Synthèse structurale de mécanismes plats. Analyse structurale des mécanismes Couples cinématiques et leurs classifications
3. ANALYSE STRUCTURELLE ET SYNTHÈSE DU MÉCANISME
Le but de l'analyse structurelle est d'étudier la structure du mécanisme, de déterminer son degré de mobilité et sa classe.
3.1. Les paires cinématiques et leur classification
Considérez les principaux types et symboles des paires cinématiques (Fig. 3.1) /11/.
Riz. 3.1 Couples cinématiques et leurs symboles
Comme signes de la classification des couples cinématiques peuvent être : le nombre de conditions de liaison et la nature du contact des liaisons.
Toutes les paires cinématiques sont divisées en classes en fonction du nombre de restrictions imposées au mouvement relatif des liens, ce qui
Développé par Korchagin P.A.

inclus dans ces paires. Ces restrictions sont appelées conditions de communication dans
paires cinématiques /6/. |
|||||
Corps solide (Fig. 3.2) dans |
|||||
espace |
6 degrés |
||||
La paire cinématique nécessite |
|||||
permanent |
Contactez |
||||
impose |
|||||
restrictions (conditions de communication) sur leur |
|||||
Circulation. Nombre de conditions de communication |
|||||
dénoté |
Peut être |
Riz. 3.2 Mouvements possibles |
|||
est égal de 1 à 5. |
Par conséquent, |
||||
le nombre de degrés de liberté H d'un lien d'une paire cinématique en mouvement relatif sera /1/
Il résulte de l'égalité que le nombre de degrés de liberté H d'un lien d'un couple cinématique en mouvement relatif peut varier de 1 à 5. Il ne peut y avoir de couple cinématique qui n'impose aucune liaison, car cela contredit la définition d'un couple cinématique. paire. Mais il ne peut y avoir de couple cinématique qui impose plus de cinq liaisons, puisque dans ce cas les deux liaisons comprises dans la paire cinématique seraient fixes l'une par rapport à l'autre, c'est-à-dire aurait formé non pas deux, mais un seul corps /6/.
La classe du couple cinématique est égale au nombre de conditions de connexion imposées au mouvement relatif de chaque maillon du couple cinématique /6/.
Selon la nature du contact des maillons, les couples cinématiques sont répartis en deux groupes : supérieur et inférieur /1/.
Une paire cinématique, qui est faite en touchant les éléments de ses liens uniquement le long de la surface, est la plus basse, et faite en touchant les éléments de ses liens uniquement le long d'une ligne ou en des points, est la plus élevée. Dans les paires inférieures, une fermeture géométrique est observée. Dans les paires supérieures - puissance - par un ressort ou un poids /1/.
Paire rotative(Fig. 3.1, a) - à déplacement unique, ne permet qu'un mouvement de rotation relatif des maillons autour de l'axe. Les maillons 1 et 2 sont en contact le long de la surface cylindrique, il s'agit donc de la paire la plus basse, fermée géométriquement /11/.
Couple translationnel(Fig. 3.1, b) - à déplacement unique, ne permet qu'un mouvement de translation relatif des maillons. Les liaisons 1 et 2 se touchent en surface, c'est donc la paire la plus basse, fermée géométriquement /11/.
Développé par Korchagin P.A.

Paire cylindrique(Fig. 3.1, c) - à deux mouvements, permet des mouvements relatifs de rotation et de translation indépendants des maillons. Les maillons 1 et 2 sont en contact le long de la surface cylindrique, c'est donc la paire la plus basse, fermée géométriquement /11/.
paire sphérique(Fig. 3.1, d) - trois mobiles, permet trois rotations relatives indépendantes des maillons. Les liaisons 1 et 2 se touchent sur une surface sphérique, c'est donc la paire la plus basse, fermée géométriquement /11/.
Des exemples de paires à quatre et cinq mouvements et leurs symboles sont donnés à la fig. 3.1, e, f. Les mouvements indépendants possibles (rotation et translation) sont indiqués par les flèches /11/.
Les inférieurs sont plus résistants à l'usure, car. la surface de contact est plus grande, par conséquent, le transfert de la même force dans les paires inférieures se produit à une pression spécifique inférieure et à des contraintes de contact inférieures à celles des paires supérieures. L'usure étant proportionnelle à la pression spécifique, les éléments des maillons des paires inférieures s'usent moins vite que les supérieurs /11/.
3.2 Chaîne cinématique
chaîne cinématique appelé un système de liens qui forment des paires cinématiques /6/.
Les chaînes cinématiques peuvent être : plates et spatiales, ouvertes et fermées, simples et complexes /1/.
Le spatial est appelé chaîne dans laquelle les points des maillons décrivent des trajectoires non planes ou situées dans des plans sécants /1/.
Une chaîne ouverte est appelée une chaîne dans laquelle il y a des maillons inclus dans une seule paire cinématique (Fig. 3.3, a) / 1 /.
Une chaîne fermée est appelée une chaîne dont chaque maillon est inclus dans au moins deux paires cinématiques (Fig. 3.3, a, b) / 1 /.
Riz. 3.3 Chaînes cinématiques a) - simples ouvertes ; b - simple fermé; c) - complexe fermé
Une chaîne simple - dans laquelle chaque maillon est inclus dans pas plus de deux paires cinématiques (Fig. 3.3, a, b).
Développé par Korchagin P.A.

Chaîne complexe - dans laquelle il y a au moins un maillon inclus dans plus de deux paires cinématiques (Fig. 3.3, c) / 1 /.
3.3 Nombre de degrés de liberté d'un système mécanique. Le degré de mouvement du mécanisme. Formules structurelles
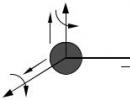
Nombre de degrés de liberté système mécanique est le nombre de déplacements indépendants possibles des éléments du système /1, 4/.
Le système (Fig. 3.5) a deux déplacements possibles indépendants par rapport à 1 lien, c'est-à-dire le système mécanique a 2 degrés de liberté
Diplôme |
mobilité |
|||||||
mécanisme |
appelé |
|||||||
degrés |
mécanisme |
|||||||
relativement |
lien accepté 2 |
|||||||
pour le /1/ fixe. |
||||||||
Faisons des formules de calcul |
||||||||
degré de mobilité |
mécanisme, |
|||||||
appelé |
de construction |
|||||||
formules. |
||||||||
spatial |
||||||||
mécanisme |
portable |
|||||||
sont des paires cinématiques. De plus, le nombre de paires de la cinquième classe est p5, la quatrième classe est p4, la troisième est p3, la deuxième est p2, la première est p1 /1/.
Le nombre de degrés de liberté de n liens non liés est /1/ :
Les paires cinématiques imposent des restrictions (conditions de liaison). Chaque paire de classe I. - une condition de connexion, classe II. - deux conditions de communication, etc. /une/
L'application de cette formule n'est possible que si aucune condition supplémentaire générale n'est imposée aux mouvements des maillons qui composent le mécanisme.
Développé par Korchagin P.A.
Si trois restrictions générales sont imposées aux mouvements de tous les maillons du mécanisme dans son ensemble, c'est-à-dire considéré comme un mécanisme plat, alors
3.4 Coordonnées généralisées du mécanisme. Liens initiaux
Le degré de mobilité du mécanisme est en même temps le nombre de coordonnées indépendantes des maillons, qui doivent être fixées pour que tous les maillons du mécanisme aient des mouvements bien définis.
Coordonnées du mécanisme généralisé sont appelées coordonnées indépendantes les unes des autres, qui déterminent la position de tous les maillons du mécanisme par rapport à la crémaillère /11/.
le premier lien un lien est appelé, auquel une ou plusieurs coordonnées généralisées du mécanisme /11/ sont affectées.
Pour le lien initial, on en choisit un qui simplifie l'analyse ultérieure du mécanisme, alors qu'il ne coïncide pas toujours avec le lien d'entrée. Pour le lien initial dans certains cas, il est commode de choisir la manivelle /11/.
3.5 Degrés de liberté supplémentaires. Connexions passives
En plus des degrés de liberté des liens et des connexions qui affectent activement la nature du mouvement des mécanismes, ils peuvent contenir des degrés de liberté et des conditions de connexion qui n'ont aucun effet sur la nature du mouvement du mécanisme dans son ensemble. La suppression des mécanismes de liens et de couples cinématiques, auxquels appartiennent ces degrés de liberté et conditions de connexion, peut se faire sans changer la nature générale du mouvement du mécanisme dans son ensemble. De tels degrés de liberté sont dits superflus et les liens sont passifs.
Les liaisons passives ou redondantes sont appelées conditions de liaison qui n'affectent pas la nature du mouvement du mécanisme /6/.
Dans certains cas, des connexions passives sont nécessaires pour assurer la sécurité du mouvement: par exemple, un parallélogramme articulé (Fig. 3.6), passant par sa position limite, lorsque les axes de tous les liens sont sur la même ligne droite, peut se transformer en un antiparallélogramme ; pour éviter cela, les manivelles AB et CD sont couplées à une connexion passive - la deuxième bielle EF. Dans d'autres cas, les connexions passives augmentent la rigidité du système, éliminent ou réduisent l'effet des déformations sur
Développé par Korchagin P.A.

mouvement du mécanisme, améliorer la répartition des forces agissant sur les biellettes du mécanisme, etc. /6/.
Riz. 3.6 Schéma cinématique du mécanisme à parallélogramme
Les degrés de liberté supplémentaires sont des degrés de liberté qui n'affectent pas la loi de mouvement du mécanisme /6/.
Il est facile d'imaginer qu'un rouleau rond (voir Fig. 3.6) peut tourner librement autour de son axe sans affecter la nature du mouvement du mécanisme dans son ensemble. Ainsi, la possibilité de rotation du galet constitue un degré de liberté supplémentaire. Le galet est un élément structurel introduit pour réduire la résistance, les forces de frottement et l'usure des maillons. La cinématique du mécanisme ne changera pas si le rouleau est retiré et le poussoir est connecté directement à la liaison CD dans une paire cinématique de classe IV (voir Fig. 3.6, b) /6/.
Si le nombre de degrés de liberté d'un mécanisme plat est connu, alors il est possible de trouver le nombre de liaisons en excès q pour un mécanisme plat en utilisant la formule /11/
je=1
Les formules structurelles n'incluent pas les tailles unitaires, par conséquent, dans l'analyse structurelle, elles peuvent être supposées être quelconques (dans certaines limites).
S'il n'y a pas de liaisons redondantes (q=0), alors le montage du mécanisme se fait sans déformation des biellettes, celles-ci semblent s'auto-régler, et les mécanismes sont dits auto-réglables. S'il y a des liaisons redondantes (q > 0), alors l'assemblage du mécanisme et le mouvement de ses biellettes ne deviennent possibles que lorsque ces dernières se déforment /11/.
Selon les formules (3.6) − (3.8), une analyse structurelle des mécanismes existants et des schémas structurels des nouveaux mécanismes est effectuée /11/.
Développé par Korchagin P.A.

3.6 L'effet des connexions redondantes sur les performances
et fiabilité des machines
Comme indiqué plus haut, en présence de maillons en excès (q > 0), le mécanisme ne peut être assemblé sans déformation des maillons. De tels mécanismes nécessitent une fabrication de haute précision. Sinon, lors du processus d'assemblage, les liens du mécanisme sont déformés, ce qui provoque le chargement de paires cinématiques et de liens avec des forces supplémentaires importantes. Avec une précision insuffisante dans la fabrication d'un mécanisme avec des connexions excessives, les frottements dans les paires cinématiques peuvent augmenter considérablement et entraîner un blocage des liens. Par conséquent, de ce point de vue, des liens redondants dans le mécanisme ne sont pas souhaitables /11/.
Cependant, dans un certain nombre de cas, il est nécessaire de concevoir et de fabriquer délibérément des mécanismes statiquement indéterminés avec des contraintes redondantes pour assurer la résistance et la rigidité requises du système, en particulier lors du transfert d'efforts importants /11/.
Par exemple, le vilebrequin d'un moteur à quatre cylindres (Fig. 3.7) forme une paire rotative à mouvement unique avec le roulement A. Ceci est tout à fait suffisant du point de vue de la cinématique de ce mécanisme à un degré de liberté (W=1). Cependant, compte tenu de la grande longueur de l'arbre et des forces importantes chargeant le vilebrequin, il faut ajouter deux roulements supplémentaires A ' et A ", sinon le système sera inopérant en raison de
en raison d'une résistance et d'une rigidité insuffisantes. |
|||||||||||
rotationnel |
|||||||||||
bimobile |
cylindrique, puis |
||||||||||
en plus des cinq liens principaux seront |
|||||||||||
imposé |
4× |
2 = 8 supplémentaires |
MAIS' |
MAIS" |
|||||||
(re)liens. aurait besoin |
|||||||||||
haute précision de fabrication pour |
|||||||||||
assurer l'alignement de tous les supports, |
|||||||||||
se déformer et des contraintes élevées inacceptables peuvent apparaître dans le matériau du roulement /11/.
Lors de la conception de machines, il convient de s'efforcer d'éliminer les connexions redondantes ou de les limiter au minimum si leur élimination complète s'avère non rentable en raison de la complexité de la conception ou pour d'autres raisons. Dans le cas général, il convient de rechercher la solution optimale en tenant compte de la disponibilité des équipements technologiques nécessaires, du coût de fabrication, des exigences
Développé par Korchagin P.A.

durée de vie et fiabilité de la machine. Il s'agit donc d'un problème d'optimisation très difficile pour chaque cas spécifique /11/.
3.7 Classification structurale des mécanismes plats selon Assur-Artobolevsky
Actuellement, les mécanismes plats sont les plus largement utilisés dans l'industrie. Par conséquent, considérons le principe de leur classification structurelle. /6/.
Les méthodes modernes d'analyse cinématique et cinétostatique et, dans une large mesure, les méthodes de synthèse des mécanismes sont associées à leur classification structurelle. La classification structurelle d'Assur Artobolevsky est l'une des classifications les plus rationnelles des mécanismes à levier plat avec des paires inférieures. L'avantage de cette classification est que les méthodes d'étude cinématique, cinétostatique et dynamique des mécanismes lui sont indissociables /6/.
Assur a proposé (1914-18) de considérer tout mécanisme plat à paires inférieures comme une combinaison du mécanisme initial et d'un certain nombre de chaînes cinématiques à mobilité nulle /1, 6/.
Mécanisme initial (ou initial) (Fig. 3.8) est appelé l'ensemble des maillons et des racks initiaux. /6/.
Le groupe Assur (Fig. 3.9, a) ou le groupe structurel est une chaîne cinématique dont le nombre de degrés de liberté est nul, par rapport aux éléments de ses paires externes, et le groupe ne doit pas se décomposer en chaînes cinématiques plus simples qui satisfont à cette condition. Si une telle désintégration est possible, alors une telle chaîne cinématique est constituée de plusieurs groupes Assur /L.3/.
Développé par Korchagin P.A.

Sur la fig. 3.9, b montre la chaîne cinématique dont le degré de mobilité est égal à
W=3 n − 2 p5 =3 4 − 2 6=0 |
Mais malgré cela, cette chaîne n'est pas un groupe Assur, puisqu'elle se scinde en deux groupes (mis en évidence par un trait fin) dont le degré de mobilité est également égal à zéro.
Le degré de mobilité gr. Assura est égal à :
W=3 n − 2 p5 =0 |
||||
p 5 = |
||||
D'après la formule (3.11), on peut voir que n ne peut être qu'un multiple entier de deux, puisque le nombre de paires cinématiques p5 peut être
nombre entier. Alors |
composer |
définir |
|||||||
nombre de paires cinématiques et liens dans le groupe Assur /1/ |
|||||||||
Tableau 3.1 |
|||||||||
Nombre de liens |
|||||||||
Nombre de paires cinématiques |
|||||||||
Selon la suggestion d'Artobolevsky, la classe et l'ordre /1/ sont affectés à des groupes structuraux.
Classe Assura est égal au nombre de couples cinématiques inclus dans la boucle fermée la plus complexe formée par les couples cinématiques internes /1/.
Ordre du groupe Assur est égal au nombre d'éléments libres des couples cinématiques /1/.
La classe du mécanisme est égale à la classe la plus élevée du groupe Assur qui en fait partie /1/.
Le mécanisme d'origine (voir Figure 3.8) est affecté à la première classe. La première colonne du tableau 3.1 fait référence à gr. classe Assura II; deuxième -
Classe III, etc. Des exemples de groupes Assur sont illustrés à la fig. 3.10.
Développé par Korchagin P.A.

Riz. 3.10 Groupes assurés :
a) - Classe II, 2e ordre ; b) – classe III 3ème ordre ; c) – classe III 4ème ordre ;
d) – Classe IV 4e ordre
La combinaison la plus simple des nombres de liens et de paires qui satisfont la condition (3.11) sera n=2, p5 =3. Un groupe qui a deux liens et trois paires de classe V est appelé un groupe II de la deuxième classe du second ordre ou un groupe à deux conducteurs. Les groupes à deux têtes sont de cinq types (tableau 3.2). Un groupe bifilaire avec trois paires de translation n'est pas possible, car, étant attaché au rack, il n'a pas de mobilité nulle et peut se déplacer /6/.
3.8 Un exemple d'analyse structurale d'un mécanisme planaire
Effectuons une analyse structurelle du mécanisme de sommation illustré à la fig. 3.11.
Ordre d'analyse structurelle :
1. Détecter et éliminer les degrés de liberté inutiles et les connexions passives (dans ce cas, la rotation des rouleaux)
Développé par Korchagin P.A.
1. Etude structurale et cinématique du mécanisme plan-levier
1.1 Analyse structurelle du mécanisme
1.1.1 Nom des liens et leur nombre
Le schéma fonctionnel du mécanisme est donné. Le mécanisme est conçu pour convertir le mouvement de rotation de la manivelle 1 en mouvement alternatif du coulisseau 5.
Pour ce mécanisme manivelle-curseur (représenté sur 1 feuille de la tâche graphique), le nom des maillons et leur nombre sont donnés dans le tableau 1.
Tableau 1
1.1.2 Couples cinématiques et leurs classifications
Pour ce mécanisme manivelle-curseur, les paires cinématiques et leurs classifications sont présentées dans le tableau 2.
Tableau 2
Total des liens 6 d'entre eux mobile n=5
1.1.3 Le degré de mouvement du mécanisme
Le nombre de degrés de liberté (degré de liberté) du mécanisme manivelle-curseur est déterminé par la formule P.L. Tchebychev :
où n est le nombre de maillons mobiles du mécanisme ;
P 1 est le nombre de paires cinématiques à mouvement unique.
Car W=1 le mécanisme a un lien principal et ce lien est #1.
1.1.4 Décomposition du mécanisme en groupes structurels (groupes Assur)
La décomposition du mécanisme manivelle-curseur en groupes structuraux (groupes Assur) est présentée dans le tableau 3.
Tableau 3
| Groupe | croquis de groupe | Les liens qui composent le groupe | CP dans le groupe | Degré de mobilité | Classe, ordre, modification de groupe | |
| interne | externe | |||||
| Groupe de tête | Environ 1 A | 1–0 | Environ 1 | MAIS | W=1 | 1 vue classe 1. |
| Groupe Assura | Environ 2 AB | 2–3 | B3 (2–3) | A (2–1) O 2 (0–3) | W=1 | II classe., 2 fois., 3 mod. |
| Groupe Assura | Environ 3 cc | 4–5 | D4 (4–5) | C (2–4) D 5 (0–5) | W=1 | II classe., 2 fois., 2 mod. |
1.1.5 Formule structurale du mécanisme (ordre de montage)
Au mécanisme de classe 1, type 1, constitué des maillons 0 et 1, est rattaché le groupe Assur de classe II, 2 ordres, 3 modifications, constitué des maillons 2 et 3. A ce groupe, le groupe Assur de classe II , 2 commandes, 2 modifications, composées des maillons 4 et 5.
1.2 Analyse cinématique du mécanisme
Objectif: déterminer la position des maillons et la trajectoire de leurs points, déterminer les vitesses et les accélérations des points des maillons, ainsi que déterminer les vitesses angulaires et les accélérations angulaires des maillons en fonction de la loi de mouvement donnée du moteur principal lien.
1.2.1 Méthode d'analyse cinématique graphique
Elle consiste à tracer les courbes de déplacement, de vitesse et d'accélération du dernier maillon du mécanisme en fonction du temps (construction de diagrammes cinématiques) et à déterminer leurs vraies valeurs.
1.2.1.1 Plans de construction pour la position du mécanisme
L'analyse cinématique commence par la construction d'un plan de la position du mécanisme. Pour ce faire, vous devez savoir :
1) dimensions des maillons du mécanisme, m;
2) l'amplitude et la direction de la vitesse angulaire du lien principal
.Les dimensions des maillons du mécanisme sont :
Choisissez le facteur d'échelle de longueur :
La position zéro est la position la plus basse du curseur 5 - le début du dépassement de la force F p.s.
Le plan construit de la position du mécanisme est présenté sur la feuille n°1 de la partie graphique du projet de cours.
La longueur des segments représentant les liens du mécanisme dans le dessin sera égale à :
1.2.1.2 Construire un diagramme de déplacement
Le diagramme de déplacement du cinquième maillon est une représentation graphique de la loi de son mouvement.
Nous dessinons les axes de coordonnées (partie graphique, feuille n°1). Sur l'axe des abscisses on réserve un segment
, représentant sur une échelle le temps T(s) d'une période (le temps d'un tour complet de la liaison de sortie) :Facteur d'échelle temporelle :
Nous reportons le mouvement du lien de sortie le long de l'axe des ordonnées, prenons-le comme zéro - la position la plus basse du curseur. Le facteur d'échelle sera :
Le schéma construit est présenté sur la feuille n°1 de la partie graphique du projet de cours.
1.2.1.3 Tracer un diagramme de vitesse
La construction du diagramme des vitesses est réalisée par la méthode de différenciation graphique du diagramme des angles de rotation (par la méthode des cordes).
H 1 \u003d 25 mm - la distance au pôle de différenciation graphique (P 1).
Le facteur d'échelle du diagramme de vitesse angulaire :
Le diagramme de vitesse construit est présenté sur la feuille n°1 de la partie graphique du projet de cours.
1.2.1.4 Construire un diagramme d'accélération
La construction du diagramme d'accélération est réalisée par la méthode de différenciation graphique du diagramme de vitesse angulaire.
H 2 \u003d 15 mm - la distance au pôle de différenciation graphique (P 2).
Facteur de mise à l'échelle du diagramme d'accélération angulaire :
Le diagramme d'accélération construit est présenté sur la feuille n°1 de la partie graphique du projet de cours.
Les vraies valeurs de cylindrée, de vitesse et d'accélération sont indiquées dans le tableau récapitulatif 4.
Tableau 4
| Numéro de poste | je, m | v, Mme | un, m/s 2 |
| 0 | 0,00 | 0,00 | 14,56 |
| 1 | 0,07 | 1,02 | 6,48 |
| 2 | 0,15 | 0,99 | -1,38 |
| 3 | 0,22 | 0,88 | -0,63 |
| 4 | 0,29 | 0,92 | 1,64 |
| 5 | 0,36 | 1,11 | 2,97 |
| 6 | 0,46 | 1,33 | 1,95 |
| 7 | 0,56 | 1,34 | -3,19 |
| 8 | 0,65 | 0,59 | -28,31 |
| 9 | 0,62 | -2,69 | -35,90 |
| 10 | 0,29 | -4,53 | 0,94 |
| 11 | 0,02 | -1,20 | 19,41 |
1.2.2 Méthode analytique des graphes d'analyse cinématique
1.2.2.1 Construire un plan de vitesse
Donnée initiale:
Vitesse angulaire du lien d'entraînement
1. La vitesse absolue du point A 1 à l'extrémité du maillon principal 1
2. Facteur d'échelle :
La longueur du vecteur vitesse du point A.
Synthèse structurale et analyse des mécanismes
Les principaux types de mécanismes
Sur la base des propriétés cinématiques, structurelles et fonctionnelles, les mécanismes sont divisés en:
1. Levier(Fig. 2 a, b) - conçu pour convertir le mouvement de rotation du lien d'entrée en mouvement alternatif du lien de sortie. Ils peuvent transmettre une grande force et puissance.
2. Caméra(Fig. 2 c, d) - conçu pour convertir le mouvement de rotation ou de va-et-vient de la liaison d'entrée en mouvement de va-et-vient ou de va-et-vient de la liaison de sortie. En donnant aux profils de la came et du poussoir les contours appropriés, il est toujours possible de mettre en oeuvre n'importe quelle loi souhaitée du mouvement du poussoir.
3. Dentelé(Fig. 2 f) - formé à l'aide d'engrenages. Sert à transférer la rotation entre les axes fixes et mobiles. Les engrenages à axes parallèles sont réalisés à l'aide d'engrenages cylindriques, à axes sécants - à l'aide d'engrenages coniques, et à axes croisés - à l'aide d'une vis sans fin et d'une roue à vis sans fin.
4. Friction(Fig. 2 e) - le mouvement du maillon menant au maillon mené est transmis en raison des forces de frottement résultant du contact de ces maillons.
La synthèse structurelle d'un mécanisme est généralement appelée la conception d'un schéma structurel d'un mécanisme, qui se compose de liaisons fixes et mobiles et de paires cinématiques. C'est la première étape de l'élaboration d'un schéma d'un mécanisme qui satisfait aux conditions données. Les données initiales sont généralement les types de mouvement des maillons moteurs et de travail du mécanisme, la position relative des axes de rotation et le sens du mouvement de translation des maillons, leurs mouvements angulaires et linéaires, leurs vitesses et accélérations. La méthode la plus pratique pour trouver un schéma structurel consiste à attacher des groupes structurels Assur à un maillon principal ou à un mécanisme principal.

Dans le cadre de l'analyse structurelle du mécanisme, il est d'usage de comprendre la détermination du nombre de liens et de paires cinématiques, la détermination du degré de mobilité du mécanisme, ainsi que l'établissement de la classe et de l'ordre du mécanisme.
Le degré de mobilité du mécanisme spatial est déterminé par la formule de Somov-Malyshev :
W = 6n-(5P 1 +4P 2 + 3P 3 + 2P 4 + P 5) (1)
où R 1, R 2, R 3, R 4, P 5 - le nombre de paires cinématiques à un, deux, trois, quatre et cinq mouvements; n est le nombre de liens mobiles.
Le degré de mobilité du mécanisme plat est déterminé par la formule de Chebyshev :
W=3n-2P H - P B (2)
où rn est le nombre de paires cinématiques inférieures, et P in est le nombre de paires cinématiques supérieures.
A titre d'exemple, considérons un mécanisme de direction de pilote automatique à quatre biellettes (Fig. 3.3) : les biellettes 1 et 2 forment une paire cylindrique de la quatrième classe, qui a deux degrés de liberté ; les liaisons 2-3 et 4-1 forment des couples de rotation de la cinquième classe, à un degré de liberté ; les maillons 3-4 forment une paire de billes de la troisième classe, à trois degrés de liberté ; le nombre de liens mobiles est de trois, alors
B=6 3-2 5-1 4-1 3=1
Le degré de mobilité de ce mécanisme est de 1.

Une chaîne cinématique dont le nombre de degrés de liberté par rapport aux éléments de ses paires cinématiques externes est égal à zéro est appelée groupe structurel Assur, du nom de L.V. Assur, qui a été le premier à étudier fondamentalement et à proposer une classification structurelle des mécanismes à tige plate. Un exemple de la formation d'un mécanisme plat à six maillons est donné à la fig. quatre.

Les groupes structurels sont subdivisés par classe et commander. La classe du groupe est déterminée par le nombre maximum de paires cinématiques incluses dans une liaison (Fig. 5).
L'ordre du groupe est déterminé par le nombre d'éléments avec lesquels le groupe est attaché au mécanisme principal (Fig. 6).

La classe et l'ordre du mécanisme dépendent du maillon principal.
Ils ont les mêmes méthodes de recherche quel que soit leur domaine d'application ou leur finalité fonctionnelle.
Il est nécessaire de savoir ce qu'est un groupe structurel (groupe Assur), comment sont déterminés sa classe, son ordre et son type. Il est conseillé de se souvenir d'un tableau montrant la combinaison des liens et des paires cinématiques de la cinquième classe dans un groupe :
| n groupes | 2 | 4 | 6 | 8 | … |
| P 5 groupes | 3 | 6 | 9 | 12 | … |
La solution du problème commence par déterminer le nombre de degrés de liberté de la chaîne cinématique sous-jacente à ce mécanisme. En fonction du nombre de degrés de liberté, le nombre de maillons initiaux (ou maillons d'entrée) est attribué, après quoi la chaîne devient un mécanisme.
Après avoir rejoint chaque groupe Assur, un mécanisme intermédiaire doit être obtenu, avec le même nombre de degrés de liberté que celui indiqué. Après avoir attaché le dernier groupe, le mécanisme spécifié à l'origine doit être obtenu.
Faites attention au fait que la classe du mécanisme (et donc les méthodes pour le résoudre) sont déterminées non seulement par le schéma du mécanisme, mais aussi par le lien pris comme entrée. Avec le même schéma, mais avec des liens d'entrée différents, des mécanismes de classe différente peuvent être obtenus et, par conséquent, les méthodes de leur étude seront différentes.
Il convient également de noter que la présence d'un mécanisme en boucle fermée dans le circuit ne détermine pas la classe du mécanisme, puisque lorsqu'ils sont divisés en groupes Assur, ces contours peuvent se fragmenter. Mais si un contour est conservé dans le groupe Assur, alors il détermine la classe de ce groupe, et à travers la classe du groupe, la classe du mécanisme.
Dans les mécanismes, des charnières doubles et plus complexes peuvent se produire, vous devez donc être prudent lors de la détermination du nombre de degrés de liberté, ainsi que lors de la décomposition du mécanisme en groupes Assur.
Gardez à l'esprit ce qui suit :
- avec le même schéma, vous pouvez obtenir différents mécanismes en termes de méthodes de recherche si vous définissez différents liens en entrée ;
- à partir des mêmes groupes d'Assur, il est possible de composer différents mécanismes avec des objectifs fonctionnels différents ;
- un groupe structurel (le groupe Assur) a les mêmes propriétés et méthodes de recherche, quel que soit le mécanisme dans lequel il se situe. Cette propriété très importante permet de développer des méthodes de recherche uniquement pour les groupes Assur, et non pour chaque mécanisme de leur grand nombre ;
- La classification structurelle considérée est applicable non seulement à l'analyse des mécanismes existants, mais également à la synthèse ciblée de mécanismes aux propriétés prévisibles (en joignant les groupes Assur aux mécanismes initiaux ou initiaux et à leur stratification ultérieure).
Si le mécanisme a deux degrés de liberté, il est nécessaire de définir deux liaisons initiales.
Si le mécanisme a des paires cinématiques supérieures de classe IV, alors avant de diviser le mécanisme en groupes structurels, il est nécessaire de remplacer les paires supérieures par des chaînes avec des paires inférieures, car Les groupes Assur ne comprennent que les couples de classe V.
Pour une analyse ultérieure, il convient de comparer le nombre de degrés de liberté du mécanisme donné et le mécanisme obtenu après remplacement des paires supérieures.
Il peut y avoir des degrés de liberté supplémentaires dans le mécanisme. La formule de détermination du nombre de degrés de liberté donne le bon résultat pour le cas général, mais dans le cas particulier, pour certaines tailles de liens, le nombre réel de degrés de liberté peut différer de celui déterminé par la formule.
Habituellement, la présence d'un galet rond donne un degré de liberté supplémentaire (sa rotation autour de son propre axe donne au mécanisme un degré de liberté supplémentaire, mais ce mouvement n'affecte pas la nature du fonctionnement des maillons restants et de l'ensemble du mécanisme car un ensemble). Le nombre de mécanismes initiaux doit donc être fixé en fonction du nombre effectif de degrés de liberté (W réel = W calculé - W superflu).
Lors du remplacement de la paire la plus élevée, le degré de liberté en excès disparaît automatiquement (donc, après avoir remplacé la paire la plus élevée, la nouvelle valeur calculée du nombre de degrés de liberté sera égale au nombre de degrés de liberté actuel). Ceci est pratique pour vérifier l'exactitude de l'établissement de la présence ou de l'absence de degrés de liberté supplémentaires.
Dans certains cas, il est difficile de déterminer la classe des groupes Assur et, par conséquent, le mécanisme selon le schéma cinématique, car certains triangles dégénèrent en lignes droites, les côtés des contours peuvent être représentés par des curseurs, etc. En conséquence, il est assez difficile de déterminer la présence d'un contour fermé dans un groupe et le nombre de ses côtés. Dans ce cas, il convient d'utiliser la construction d'un schéma structurel d'un mécanisme (ou d'un groupe séparé).
Le schéma fonctionnel est dessiné sans échelle, tous les liens inclus dans trois paires cinématiques sont représentés sous forme de triangles rigides, les liens inclus dans quatre paires cinématiques sont représentés sous forme de quadrilatères rigides, etc., tous les curseurs sont conditionnellement remplacés par des charnières. Ainsi, un autre mécanisme est formé avec la même structure, mais avec un schéma plus visuel pour résoudre ce problème. Naturellement, dans des recherches ultérieures, le mécanisme initialement spécifié est pris en compte.
Synthèse structurale et analyse des mécanismes
Synthèse structurale mécanisme consiste à concevoir son schéma de structure, qui est communément compris comme un schéma de mécanisme indiquant la crémaillère, les liaisons mobiles, les types de couples cinématiques et leur position relative.
La méthode de synthèse structurale des mécanismes, proposée par le scientifique russe L. V. Assur en 1914 ᴦ., est la suivante : le mécanisme doit être
formé par superposition de groupes structurels à un ou plusieurs maillons initiaux et une crémaillère.
Groupe structurel(groupe Assur) est appelée une chaîne cinématique dont le nombre de degrés de liberté est égal à zéro après son rattachement par des paires cinématiques externes à la crémaillère et qui ne se décompose pas en chaînes plus simples satisfaisant à cette condition.
Le principe de la superposition est illustré par l'exemple de la formation d'un mécanisme à levier à 6 maillons (Fig. 1.3).
– angle de rotation de la manivelle (coordonnée généralisée).

Il est important de noter que pour les groupes structuraux de mécanismes planaires avec des paires inférieures
![]() , où ,
, où ,
où O est le nombre de degrés de liberté ; n– nombre de liens mobiles; P n est le nombre de paires inférieures.
Ce rapport est satisfait par les combinaisons suivantes (tableau 1.2)
Les paires inférieures agissent comme des paires à mouvement unique.
| n | … | |||
| P n | … |
Le plus simple est le groupe structurel pour lequel n= 2 et P n= 3. Il est communément appelé groupe structurel de la deuxième classe.
Ordre groupe structurel est déterminé par le nombre d'éléments de ses paires cinématiques externes, avec lesquels il peut être attaché au mécanisme. Tous les groupes de la seconde classe sont du second ordre.
Les groupes structurels qui ont n= 4 et P n\u003d 6, il y a la troisième ou la quatrième classe (Fig. 12.4)
Classer groupe structurel dans le cas général est déterminé par le nombre de paires cinématiques dans une boucle fermée formée par des paires cinématiques internes.
La classe d'un mécanisme est déterminée par la classe la plus élevée du groupe structurel inclus dans sa composition.
L'ordre de formation d'un mécanisme s'écrit comme une formule de sa structure. Pour l'exemple considéré (Fig. 12.3):
mécanisme de seconde classe. Les chiffres romains indiquent la classe des groupes structuraux et les chiffres arabes indiquent les numéros des liens à partir desquels ils sont formés. Ici, les deux groupes structuraux appartiennent à la seconde classe, au second ordre, au premier type.
Synthèse structurale et analyse des mécanismes - concept et types. Classement et caractéristiques de la catégorie "Synthèse structurelle et analyse des mécanismes" 2017, 2018.