Δομική σύνθεση επίπεδων μηχανισμών. Δομική ανάλυση μηχανισμών Κινηματικά ζεύγη και ταξινομήσεις τους
3. ΔΟΜΙΚΗ ΑΝΑΛΥΣΗ ΚΑΙ ΣΥΝΘΕΣΗ ΤΟΥ ΜΗΧΑΝΙΣΜΟΥ
Ο σκοπός της δομικής ανάλυσης είναι να μελετήσει τη δομή του μηχανισμού, να καθορίσει τον βαθμό κινητικότητας και την τάξη του.
3.1. Τα κινηματικά ζεύγη και η ταξινόμηση τους
Εξετάστε τους κύριους τύπους και σύμβολα κινηματικών ζευγών (Εικ. 3.1) /11/.
Ρύζι. 3.1 Κινηματικά ζεύγη και τα σύμβολά τους
Ως σημάδια της ταξινόμησης των κινηματικών ζευγών μπορεί να είναι: ο αριθμός των συνθηκών σύνδεσης και η φύση της επαφής των συνδέσμων.
Όλα τα κινηματικά ζεύγη χωρίζονται σε κατηγορίες ανάλογα με τον αριθμό των περιορισμών που επιβάλλονται στη σχετική κίνηση των συνδέσμων, οι οποίοι
Αναπτύχθηκε από τον Korchagin P.A.

περιλαμβάνονται σε αυτά τα ζεύγη. Αυτοί οι περιορισμοί ονομάζονται συνθήκες επικοινωνίας
κινηματικά ζεύγη /6/. |
|||||
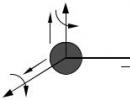
Συμπαγές σώμα (Εικ. 3.2) σε |
|||||
χώρος |
6 μοίρες |
||||
Το κινηματικό ζεύγος απαιτεί |
|||||
μόνιμος |
Επικοινωνία |
||||
επιβάλλει |
|||||
περιορισμούς (συνθήκες επικοινωνίας) επί τους |
|||||
ΚΙΝΗΣΗ στους ΔΡΟΜΟΥΣ. Αριθμός συνθηκών επικοινωνίας |
|||||
συμβολίζεται |
μπορεί |
Ρύζι. 3.2 Πιθανές κινήσεις |
|||
ισούται από 1 έως 5. |
Συνεπώς, |
||||
ο αριθμός των βαθμών ελευθερίας H ενός συνδέσμου ενός κινηματικού ζεύγους σε σχετική κίνηση θα είναι /1/
Από την ισότητα προκύπτει ότι ο αριθμός των βαθμών ελευθερίας H ενός συνδέσμου ενός κινηματικού ζεύγους σε σχετική κίνηση μπορεί να κυμαίνεται από 1 έως 5. Δεν μπορεί να υπάρχει ένα κινηματικό ζεύγος που να μην επιβάλλει καμία σύνδεση, καθώς αυτό έρχεται σε αντίθεση με τον ορισμό του κινηματικού ζεύγος. Αλλά δεν μπορεί να υπάρξει ένα κινητικό ζεύγος που να επιβάλλει περισσότερους από πέντε δεσμούς, αφού σε αυτή την περίπτωση και οι δύο σύνδεσμοι που περιλαμβάνονται στο κινηματικό ζεύγος θα ήταν σταθεροί μεταξύ τους, δηλ. θα είχε σχηματίσει όχι δύο, αλλά ένα σώμα /6/.
Η κλάση του κινηματικού ζεύγους είναι ίση με τον αριθμό των συνθηκών σύνδεσης που επιβάλλονται στη σχετική κίνηση κάθε συνδέσμου του κινηματικού ζεύγους /6/.
Σύμφωνα με τη φύση της επαφής των συνδέσμων, τα κινηματικά ζεύγη χωρίζονται σε δύο ομάδες: υψηλότερα και χαμηλότερα /1/.
Ένα κινηματικό ζεύγος, το οποίο δημιουργείται αγγίζοντας τα στοιχεία των δεσμών του μόνο κατά μήκος της επιφάνειας, είναι το χαμηλότερο και που δημιουργείται αγγίζοντας τα στοιχεία των συνδέσμων του μόνο κατά μήκος μιας γραμμής ή σε σημεία, είναι το υψηλότερο. Στα κάτω ζεύγη παρατηρείται γεωμετρικό κλείσιμο. Σε υψηλότερα ζεύγη - δύναμη - με ελατήριο ή βάρος /1/.
Περιστροφικό ζεύγος(Εικ. 3.1, α) - μονή κίνηση, επιτρέπει μόνο σχετική περιστροφική κίνηση των συνδέσμων γύρω από τον άξονα. Οι σύνδεσμοι 1 και 2 βρίσκονται σε επαφή κατά μήκος της κυλινδρικής επιφάνειας, επομένως, αυτό είναι το χαμηλότερο ζεύγος, κλειστό γεωμετρικά /11/.
Μεταφραστικό ζευγάρι(Εικ. 3.1, β) - μονή κίνηση, επιτρέπει μόνο σχετική μεταφραστική κίνηση των συνδέσμων. Οι σύνδεσμοι 1 και 2 αγγίζουν την επιφάνεια, επομένως, αυτό είναι το χαμηλότερο ζεύγος, κλειστό γεωμετρικά /11/.
Αναπτύχθηκε από τον Korchagin P.A.

Κυλινδρικό ζευγάρι(Εικ. 3.1, γ) - δύο κινήσεις, επιτρέπει ανεξάρτητες περιστροφικές και μεταφορικές σχετικές κινήσεις των συνδέσμων. Οι σύνδεσμοι 1 και 2 βρίσκονται σε επαφή κατά μήκος της κυλινδρικής επιφάνειας, επομένως αυτό είναι το χαμηλότερο ζεύγος, κλειστό γεωμετρικά /11/.
σφαιρικό ζεύγος(Εικ. 3.1, δ) - τρία κινούμενα, επιτρέπει τρεις ανεξάρτητες σχετικές περιστροφές των συνδέσμων. Οι σύνδεσμοι 1 και 2 αγγίζουν μια σφαιρική επιφάνεια, επομένως, αυτό είναι το χαμηλότερο ζεύγος, κλειστό γεωμετρικά /11/.
Παραδείγματα τεσσάρων και πέντε κινούμενων ζευγών και των συμβόλων τους δίνονται στο σχ. 3.1, ε, στ. Πιθανές ανεξάρτητες κινήσεις (περιστροφικές και μεταφορικές) φαίνονται με τα βέλη /11/.
Τα χαμηλότερα είναι πιο ανθεκτικά στη φθορά, γιατί. η επιφάνεια επαφής είναι μεγαλύτερη, επομένως, η μεταφορά της ίδιας δύναμης σε χαμηλότερα ζεύγη συμβαίνει σε χαμηλότερη ειδική πίεση και χαμηλότερες τάσεις επαφής από ό,τι σε υψηλότερες. Η φθορά είναι ανάλογη της συγκεκριμένης πίεσης, οπότε τα στοιχεία των συνδέσμων των κατώτερων ζευγών φθείρονται πιο αργά από τα υψηλότερα /11/.
3.2 Κινηματική αλυσίδα
κινηματική αλυσίδαονομάζεται σύστημα συνδέσμων που σχηματίζουν κινηματικά ζεύγη /6/.
Οι κινηματικές αλυσίδες μπορεί να είναι: επίπεδες και χωρικές, ανοιχτές και κλειστές, απλές και σύνθετες /1/.
Μια χωρική αλυσίδα είναι μια αλυσίδα στην οποία τα σημεία των κρίκων περιγράφουν μη επίπεδες τροχιές ή τροχιές που βρίσκονται σε τεμνόμενα επίπεδα /1/.
Μια ανοιχτή αλυσίδα ονομάζεται αλυσίδα στην οποία υπάρχουν σύνδεσμοι που περιλαμβάνονται σε ένα μόνο κινηματικό ζεύγος (Εικ. 3.3, α) / 1 /.
Μια κλειστή αλυσίδα ονομάζεται αλυσίδα, κάθε κρίκος της οποίας περιλαμβάνεται σε τουλάχιστον δύο κινηματικά ζεύγη (Εικ. 3.3, α, β) / 1 /.
Ρύζι. 3.3 Κινηματικές αλυσίδες α) - ανοιχτό απλό. β - κλειστό απλό? γ) - κλειστό συγκρότημα
Μια απλή αλυσίδα - στην οποία κάθε σύνδεσμος περιλαμβάνεται σε όχι περισσότερα από δύο κινηματικά ζεύγη (Εικ. 3.3, α, β).
Αναπτύχθηκε από τον Korchagin P.A.

Σύνθετη αλυσίδα - στην οποία υπάρχει τουλάχιστον ένας κρίκος που περιλαμβάνεται σε περισσότερα από δύο κινηματικά ζεύγη (Εικ. 3.3, γ) / 1 /.
3.3 Αριθμός βαθμών ελευθερίας ενός μηχανικού συστήματος. Ο βαθμός κίνησης του μηχανισμού. Δομικοί τύποι
Αριθμός βαθμών ελευθερίαςμηχανικό σύστημα είναι ο αριθμός των ανεξάρτητων πιθανών μετατοπίσεων των στοιχείων του συστήματος /1, 4/.
Το σύστημα (Εικ. 3.5) έχει δύο ανεξάρτητες πιθανές μετατοπίσεις σε σχέση με 1 σύνδεσμο, δηλ. το μηχανικό σύστημα έχει 2 βαθμούς ελευθερίας
Βαθμός |
κινητικότητα |
|||||||
μηχανισμός |
που ονομάζεται |
|||||||
βαθμούς |
μηχανισμός |
|||||||
σχετικά |
λήφθηκε σύνδεσμος 2 |
|||||||
για το σταθερό /1/. |
||||||||
Ας φτιάξουμε τύπους για τον υπολογισμό |
||||||||
βαθμό κινητικότητας |
μηχανισμός, |
|||||||
που ονομάζεται |
κατασκευαστικός |
|||||||
ΜΑΘΗΜΑΤΙΚΟΙ τυποι. |
||||||||
χωρική |
||||||||
μηχανισμός |
κινητό |
|||||||
είναι κινηματικά ζεύγη. Επιπλέον, ο αριθμός των ζευγών της πέμπτης τάξης είναι p5, η τέταρτη τάξη είναι p4, η τρίτη είναι p3, η δεύτερη είναι p2, η πρώτη είναι p1 /1/.
Ο αριθμός των βαθμών ελευθερίας των άσχετων n συνδέσεων είναι /1/:
Τα κινηματικά ζεύγη επιβάλλουν περιορισμούς (συνθήκες σύνδεσης). Κάθε ζευγάρι της I τάξης. - μία προϋπόθεση σύνδεσης, κατηγορίας II. - δύο συνθήκες επικοινωνίας κ.λπ. /ένας/
Η εφαρμογή αυτού του τύπου είναι δυνατή μόνο εάν δεν επιβληθούν γενικοί πρόσθετοι όροι στις κινήσεις των συνδέσμων που απαρτίζουν τον μηχανισμό.
Αναπτύχθηκε από τον Korchagin P.A.
Εάν επιβληθούν τρεις γενικοί περιορισμοί στις κινήσεις όλων των συνδέσμων του μηχανισμού στο σύνολό του, δηλ. θεωρείται επίπεδος μηχανισμός, λοιπόν
3.4 Γενικευμένες συντεταγμένες του μηχανισμού. Αρχικοί σύνδεσμοι
Ο βαθμός κινητικότητας του μηχανισμού είναι ταυτόχρονα και ο αριθμός των ανεξάρτητων συντεταγμένων των συνδέσμων, που πρέπει να ρυθμιστούν ώστε όλοι οι σύνδεσμοι του μηχανισμού να έχουν σαφώς καθορισμένες κινήσεις.
Γενικευμένες συντεταγμένες μηχανισμού ονομάζονται συντεταγμένες ανεξάρτητες μεταξύ τους, οι οποίες καθορίζουν τη θέση όλων των συνδέσμων του μηχανισμού σε σχέση με το ράφι /11/.
τον αρχικό σύνδεσμοκαλείται ένας σύνδεσμος στον οποίο εκχωρούνται μία ή περισσότερες γενικευμένες συντεταγμένες του μηχανισμού /11/.
Για τον αρχικό σύνδεσμο επιλέγεται ένας που απλοποιεί την περαιτέρω ανάλυση του μηχανισμού, ενώ δεν συμπίπτει πάντα με τον σύνδεσμο εισόδου. Για τον αρχικό σύνδεσμο σε ορισμένες περιπτώσεις είναι βολικό να επιλέξετε τη μανιβέλα /11/.
3,5 Επιπλέον βαθμοί ελευθερίας. Παθητικές συνδέσεις
Εκτός από τους βαθμούς ελευθερίας των συνδέσεων και των συνδέσεων που επηρεάζουν ενεργά τη φύση της κίνησης των μηχανισμών, μπορεί να περιέχουν βαθμούς ελευθερίας και συνθήκες σύνδεσης που δεν έχουν καμία επίδραση στη φύση της κίνησης του μηχανισμού στο σύνολό του. Η αφαίρεση από τους μηχανισμούς των συνδέσμων και των κινηματικών ζευγών, στα οποία ανήκουν αυτοί οι βαθμοί ελευθερίας και οι συνθήκες σύνδεσης, μπορεί να γίνει χωρίς να αλλάξει η γενική φύση της κίνησης του μηχανισμού στο σύνολό του. Τέτοιοι βαθμοί ελευθερίας ονομάζονται περιττοί και οι δεσμοί είναι παθητικοί.
Παθητικοί ή περιττοί σύνδεσμοι ονομάζονται συνθήκες ζεύξης που δεν επηρεάζουν τη φύση της κίνησης του μηχανισμού /6/.
Σε ορισμένες περιπτώσεις, οι παθητικές συνδέσεις είναι απαραίτητες για τη διασφάλιση της βεβαιότητας της κίνησης: για παράδειγμα, ένα αρθρωτό παραλληλόγραμμο (Εικ. 3.6), που διέρχεται από την οριακή του θέση, όταν οι άξονες όλων των συνδέσμων βρίσκονται στην ίδια ευθεία γραμμή, μπορεί να μετατραπεί σε αντιπαραλληλόγραμμο? Για να αποφευχθεί αυτό, οι στρόφαλοι AB και CD συνδέονται με μια παθητική σύνδεση - τη δεύτερη μπιέλα EF. Σε άλλες περιπτώσεις, οι παθητικές συνδέσεις αυξάνουν την ακαμψία του συστήματος, εξαλείφουν ή μειώνουν την επίδραση των παραμορφώσεων στο
Αναπτύχθηκε από τον Korchagin P.A.

κίνηση του μηχανισμού, βελτίωση της κατανομής των δυνάμεων που δρουν στους συνδέσμους του μηχανισμού κ.λπ. /6/.
Ρύζι. 3.6 Κινηματικό σχήμα του παραλληλόγραμμου μηχανισμού
Επιπλέον βαθμοί ελευθερίας είναι οι βαθμοί ελευθερίας που δεν επηρεάζουν τον νόμο κίνησης του μηχανισμού /6/.
Είναι εύκολο να φανταστεί κανείς ότι ένας στρογγυλός κύλινδρος (βλ. Εικ. 3.6) μπορεί να περιστρέφεται ελεύθερα γύρω από τον άξονά του χωρίς να επηρεάζει τη φύση της κίνησης του μηχανισμού στο σύνολό του. Έτσι, η δυνατότητα περιστροφής του κυλίνδρου είναι ένας επιπλέον βαθμός ελευθερίας. Ο κύλινδρος είναι ένα δομικό στοιχείο που εισάγεται για τη μείωση της αντίστασης, των δυνάμεων τριβής και της φθοράς των συνδέσμων. Η κινηματική του μηχανισμού δεν θα αλλάξει εάν αφαιρεθεί ο κύλινδρος και ο ωστήρας συνδεθεί απευθείας στον σύνδεσμο CD σε ένα κινηματικό ζεύγος κατηγορίας IV (βλ. Εικ. 3.6, β) /6/.
Εάν είναι γνωστός ο αριθμός των βαθμών ελευθερίας ενός επίπεδου μηχανισμού, τότε είναι δυνατό να βρεθεί ο αριθμός των πλεονάζοντων δεσμών q για έναν επίπεδο μηχανισμό χρησιμοποιώντας τον τύπο /11/
i=1
Οι δομικοί τύποι δεν περιλαμβάνουν μεγέθη μονάδων, επομένως, στη δομική ανάλυση, μπορεί να θεωρηθεί ότι είναι οποιοδήποτε (εντός ορισμένων ορίων).
Εάν δεν υπάρχουν περιττές συνδέσεις (q=0), τότε η συναρμολόγηση του μηχανισμού πραγματοποιείται χωρίς παραμόρφωση των συνδέσμων, οι τελευταίοι φαίνεται να αυτορυθμίζονται και οι μηχανισμοί ονομάζονται αυτορυθμιζόμενοι. Εάν υπάρχουν περιττές συνδέσεις (q > 0), τότε η συναρμολόγηση του μηχανισμού και η κίνηση των συνδέσμων του καθίστανται δυνατή μόνο όταν οι τελευταίοι παραμορφωθούν /11/.
Σύμφωνα με τους τύπους (3.6) − (3.8), πραγματοποιείται /11/ δομική ανάλυση υφιστάμενων μηχανισμών και δομικών σχημάτων νέων μηχανισμών.
Αναπτύχθηκε από τον Korchagin P.A.

3.6 Η επίδραση των περιττών συνδέσεων στην απόδοση
και αξιοπιστία μηχανήματος
Όπως σημειώθηκε παραπάνω, παρουσία περίσσειας συνδέσμων (q > 0), ο μηχανισμός δεν μπορεί να συναρμολογηθεί χωρίς παραμόρφωση των συνδέσμων. Τέτοιοι μηχανισμοί απαιτούν κατασκευή υψηλής ακρίβειας. Διαφορετικά, κατά τη διαδικασία συναρμολόγησης, οι σύνδεσμοι του μηχανισμού παραμορφώνονται, γεγονός που προκαλεί τη φόρτιση κινηματικών ζευγών και συνδέσμων με σημαντικές πρόσθετες δυνάμεις. Με ανεπαρκή ακρίβεια στην κατασκευή ενός μηχανισμού με υπερβολικές συνδέσεις, η τριβή σε κινηματικά ζεύγη μπορεί να αυξηθεί πολύ και να οδηγήσει σε εμπλοκή των συνδέσμων. Επομένως, από αυτή την άποψη, οι περιττοί σύνδεσμοι στον μηχανισμό είναι ανεπιθύμητοι /11/.
Ωστόσο, σε ορισμένες περιπτώσεις είναι απαραίτητο να σχεδιαστούν και να κατασκευαστούν σκόπιμα στατικά απροσδιόριστοι μηχανισμοί με περιττούς περιορισμούς για να εξασφαλιστεί η απαιτούμενη αντοχή και ακαμψία του συστήματος, ειδικά όταν μεταφέρονται μεγάλες δυνάμεις /11/.
Για παράδειγμα, ο στροφαλοφόρος άξονας ενός τετρακύλινδρου κινητήρα (Εικ. 3.7) σχηματίζει ένα μονοκίνητο περιστροφικό ζεύγος με το ρουλεμάν Α. Αυτό είναι αρκετά επαρκές από την άποψη της κινηματικής αυτού του μηχανισμού με έναν βαθμό ελευθερίας (W=1). Ωστόσο, δεδομένου του μεγάλου μήκους του άξονα και των σημαντικών δυνάμεων που επιβαρύνουν τον στροφαλοφόρο άξονα, πρέπει να προστεθούν δύο ακόμη ρουλεμάν Α και Α, διαφορετικά το σύστημα θα είναι εκτός λειτουργίας λόγω
λόγω ανεπαρκούς αντοχής και ακαμψίας. |
|||||||||||
περιστροφικός |
|||||||||||
δικινητής |
κυλινδρικό λοιπόν |
||||||||||
εκτός από τους πέντε κύριους συνδέσμους θα είναι |
|||||||||||
επιβλήθηκε |
4× |
2 = 8 επιπλέον |
ΑΛΛΑ' |
ΑΛΛΑ" |
|||||||
(επανα)συνδέσεις. θα χρειαστεί |
|||||||||||
υψηλή ακρίβεια κατασκευής για |
|||||||||||
εξασφάλιση της ευθυγράμμισης όλων των στηρίξεων, |
|||||||||||
παραμορφώνονται και ενδέχεται να εμφανιστούν απαράδεκτα υψηλές τάσεις στο υλικό του ρουλεμάν /11/.
Όταν σχεδιάζετε μηχανές, θα πρέπει να προσπαθήσετε να εξαλείψετε τις περιττές συνδέσεις ή να τις αφήσετε στο ελάχιστο εάν η πλήρης εξάλειψή τους αποδειχθεί ασύμφορη λόγω της πολυπλοκότητας του σχεδιασμού ή για κάποιους άλλους λόγους. Στη γενική περίπτωση, θα πρέπει να αναζητηθεί η βέλτιστη λύση, λαμβάνοντας υπόψη τη διαθεσιμότητα του απαραίτητου τεχνολογικού εξοπλισμού, το κόστος κατασκευής, το απαιτούμενο
Αναπτύχθηκε από τον Korchagin P.A.

διάρκεια ζωής και αξιοπιστία του μηχανήματος. Επομένως, αυτό είναι ένα πολύ δύσκολο πρόβλημα βελτιστοποίησης για κάθε συγκεκριμένη περίπτωση /11/.
3.7 Δομική ταξινόμηση επίπεδων μηχανισμών σύμφωνα με τον Assur-Artobolevsky
Επί του παρόντος, οι επίπεδοι μηχανισμοί χρησιμοποιούνται ευρέως στη βιομηχανία. Επομένως, ας εξετάσουμε την αρχή της δομικής τους ταξινόμησης. /6/.
Οι σύγχρονες μέθοδοι κινηματικής και κινητοστατικής ανάλυσης και σε μεγάλο βαθμό μέθοδοι σύνθεσης μηχανισμών συνδέονται με τη δομική τους ταξινόμηση. Η δομική ταξινόμηση του Assur Artobolevsky είναι μια από τις πιο ορθολογικές ταξινομήσεις επίπεδων μηχανισμών μοχλού με χαμηλότερα ζεύγη. Το πλεονέκτημα αυτής της ταξινόμησης είναι ότι οι μέθοδοι κινηματικής, κινητοστατικής και δυναμικής μελέτης μηχανισμών είναι άρρηκτα συνδεδεμένες με αυτήν /6/.
Ο Assur πρότεινε (1914-18) να θεωρηθεί οποιοσδήποτε επίπεδος μηχανισμός με χαμηλότερα ζεύγη ως συνδυασμός του αρχικού μηχανισμού και ενός αριθμού κινηματικών αλυσίδων με μηδενικό βαθμό κινητικότητας /1, 6/.
Αρχικός (ή αρχικός) μηχανισμός (Εικ. 3.8) ονομάζεται το σύνολο των αρχικών συνδέσμων και ραφιών. /6/.
Η ομάδα Assur (Εικ. 3.9, α) ή η δομική ομάδα είναι μια κινηματική αλυσίδα, ο αριθμός των βαθμών ελευθερίας της οποίας είναι μηδέν, σε σχέση με τα στοιχεία των εξωτερικών ζευγών της, και η ομάδα δεν πρέπει να χωρίζεται σε απλούστερες κινηματικές αλυσίδες που ικανοποιούν αυτή την προϋπόθεση. Εάν μια τέτοια διάσπαση είναι δυνατή, τότε μια τέτοια κινηματική αλυσίδα αποτελείται από πολλές ομάδες Assur /L.3/.
Αναπτύχθηκε από τον Korchagin P.A.

Στο σχ. 3.9, το b δείχνει την κινηματική αλυσίδα, ο βαθμός κινητικότητας της οποίας είναι ίσος με
W=3 n − 2 p5 =3 4 − 2 6=0 |
Ωστόσο, παρόλα αυτά, αυτή η αλυσίδα δεν είναι ομάδα Assur, καθώς χωρίζεται σε δύο ομάδες (που επισημαίνονται με μια λεπτή γραμμή), ο βαθμός κινητικότητας των οποίων είναι επίσης ίσος με μηδέν.
Ο βαθμός κινητικότητας γρ. Το Assura ισούται με:
W=3 n − 2 p5 =0 |
||||
p 5 = |
||||
Από τον τύπο (3.11) μπορεί να φανεί ότι το n μπορεί να είναι μόνο ακέραιο πολλαπλάσιο του δύο, καθώς ο αριθμός των κινηματικών ζευγών p5 μπορεί να είναι
ολόκληρος ο αριθμός. Επειτα |
συνθέτω |
καθοριστικό |
|||||||
αριθμός κινηματικών ζευγών και συνδέσμων στην ομάδα Assur /1/ |
|||||||||
Πίνακας 3.1 |
|||||||||
Αριθμός συνδέσμων |
|||||||||
Αριθμός κινηματικών ζευγών |
|||||||||
Σύμφωνα με την πρόταση του Artobolevsky, η τάξη και η τάξη /1/ εκχωρούνται σε δομικές ομάδες.
Τάξη Assuraισούται με τον αριθμό των κινηματικών ζευγών που περιλαμβάνονται στον πιο πολύπλοκο κλειστό βρόχο που σχηματίζεται από εσωτερικά κινηματικά ζεύγη /1/.
Τάγμα της ομάδας Assurισούται με τον αριθμό των ελεύθερων στοιχείων των κινηματικών ζευγών /1/.
Η κλάση του μηχανισμού είναι ίση με την υψηλότερη κατηγορία της ομάδας Assur, η οποία είναι μέρος της /1/.
Στον αρχικό μηχανισμό (βλ. Εικόνα 3.8) εκχωρείται η πρώτη κατηγορία. Η πρώτη στήλη του πίνακα 3.1 αναφέρεται στο γρ. Assura II τάξη; δεύτερο -
III τάξη κ.λπ. Παραδείγματα ομάδων Assur φαίνονται στο σχ. 3.10.
Αναπτύχθηκε από τον Korchagin P.A.

Ρύζι. 3.10 Ομάδες Assur:
α) - II τάξη, 2η τάξη. β) – III τάξη 3ης τάξης. γ) – III τάξη 4η τάξη.
δ) – IV τάξη 4η τάξη
Ο απλούστερος συνδυασμός των αριθμών των συνδέσμων και των ζευγών που ικανοποιούν την συνθήκη (3.11) θα είναι n=2, p5 =3. Μια ομάδα που έχει δύο συνδέσμους και τρία ζεύγη κλάσης V ονομάζεται ομάδα II της δεύτερης κατηγορίας δεύτερης τάξης ή μια ομάδα δύο οδηγών. Οι ομάδες δύο οδηγών διατίθενται σε πέντε τύπους (πίνακας 3.2). Μια ομάδα δύο απαγωγών με τρία μεταφορικά ζεύγη δεν είναι δυνατή, αφού, συνδεδεμένη με το ράφι, δεν έχει μηδενική κινητικότητα και μπορεί να κινηθεί /6/.
3.8 Ένα παράδειγμα δομικής ανάλυσης ενός επίπεδου μηχανισμού
Ας κάνουμε μια δομική ανάλυση του μηχανισμού άθροισης που φαίνεται στο σχήμα. 3.11.
Σειρά δομικής ανάλυσης:
1. Εντοπίστε και εξαλείψτε τους περιττούς βαθμούς ελευθερίας και τις παθητικές συνδέσεις (στην περίπτωση αυτή, η περιστροφή των κυλίνδρων)
Αναπτύχθηκε από τον Korchagin P.A.
1. Δομική και κινηματική μελέτη του μηχανισμού επιπέδου-μοχλού
1.1 Δομική ανάλυση του μηχανισμού
1.1.1 Όνομα συνδέσμων και ο αριθμός τους
Δίνεται το μπλοκ διάγραμμα του μηχανισμού. Ο μηχανισμός έχει σχεδιαστεί για να μετατρέπει την περιστροφική κίνηση του στρόφαλου 1 σε παλινδρομική κίνηση του ολισθητήρα 5.
Για αυτόν τον μηχανισμό στροφάλου ολίσθησης (που απεικονίζεται σε 1 φύλλο της γραφικής εργασίας), το όνομα των συνδέσμων και ο αριθμός τους δίνονται στον πίνακα 1.
Τραπέζι 1
1.1.2 Κινηματικά ζεύγη και οι ταξινομήσεις τους
Για αυτόν τον μηχανισμό στροφάλου-ολισθητή, τα κινηματικά ζεύγη και οι ταξινομήσεις τους φαίνονται στον Πίνακα 2.
πίνακας 2
Σύνολο συνδέσμων 6 από αυτούς κινητά n=5
1.1.3 Ο βαθμός κίνησης του μηχανισμού
Ο αριθμός των βαθμών ελευθερίας (βαθμός ελευθερίας) του μηχανισμού στροφάλου-ολισθητή καθορίζεται από τον τύπο P.L. Chebyshev:
όπου n είναι ο αριθμός των κινούμενων συνδέσμων του μηχανισμού.
Το P 1 είναι ο αριθμός των κινηματικών ζευγών που κινούνται μόνο.
Επειδή W=1 ο μηχανισμός έχει έναν οδηγό σύνδεσμο και αυτός ο σύνδεσμος είναι #1.
1.1.4 Αποσύνθεση του μηχανισμού σε δομικές ομάδες (ομάδες Assur)
Η αποσύνθεση του μηχανισμού στροφάλου-ολισθητή σε δομικές ομάδες (ομάδες Assur) φαίνεται στον Πίνακα 3.
Πίνακας 3
| Ομάδα | ομαδικό σκίτσο | Οι σύνδεσμοι που απαρτίζουν την ομάδα | CP στην ομάδα | Βαθμός κινητικότητας | Κατηγορία, παραγγελία, τροποποίηση ομάδας | |
| οικιακός | εξωτερικός | |||||
| Ηγετική ομάδα | Περίπου 1 Α | 1–0 | Περίπου 1 | ΑΛΛΑ | W=1 | 1 τάξη 1 προβολή. |
| Assura Group | Περίπου 2 ΑΒ | 2–3 | B3 (2–3) | A (2–1) O 2 (0–3) | W=1 | II τάξη., 2 φορές., 3 μοντ. |
| Assura Group | Περίπου 3 DC | 4–5 | D4 (4–5) | C (2–4) D 5 (0–5) | W=1 | II τάξη., 2 φορές., 2 μοντ. |
1.1.5 Δομικός τύπος του μηχανισμού (σειρά συναρμολόγησης)
Στον μηχανισμό της κλάσης 1, τύπου 1, που αποτελείται από συνδέσμους 0 και 1, επισυνάπτεται η ομάδα Assur της κατηγορίας ΙΙ, 2 παραγγελίες, 3 τροποποιήσεις, που αποτελείται από τους συνδέσμους 2 και 3. Σε αυτήν την ομάδα, η ομάδα Assur της κατηγορίας ΙΙ , 2 παραγγελίες, 2 τροποποιήσεις, που αποτελούνται από τους συνδέσμους 4 και 5.
1.2 Κινηματική ανάλυση του μηχανισμού
Σκοπός: προσδιορισμός της θέσης των συνδέσμων και της τροχιάς των σημείων τους, προσδιορισμός των ταχυτήτων και των επιταχύνσεων των σημείων των συνδέσμων, καθώς και ο προσδιορισμός των γωνιακών ταχυτήτων και γωνιακών επιταχύνσεων των συνδέσμων σύμφωνα με τον δεδομένο νόμο κίνησης του οδηγού Σύνδεσμος.
1.2.1 Μέθοδος γραφικής κινηματικής ανάλυσης
Συνίσταται στην γραφική παράσταση των γραφημάτων μετατόπισης, ταχύτητας και επιτάχυνσης του τελευταίου συνδέσμου του μηχανισμού σε συνάρτηση με το χρόνο (κατασκευή κινηματικών διαγραμμάτων) και στον προσδιορισμό των πραγματικών τους τιμών.
1.2.1.1 Οικοδομικά σχέδια για τη θέση του μηχανισμού
Η κινηματική ανάλυση ξεκινά με την κατασκευή ενός σχεδίου της θέσης του μηχανισμού. Για να το κάνετε αυτό, πρέπει να γνωρίζετε:
1) διαστάσεις των συνδέσμων του μηχανισμού, m.
2) το μέγεθος και την κατεύθυνση της γωνιακής ταχύτητας του οδηγού συνδέσμου
.Οι διαστάσεις των συνδέσμων του μηχανισμού είναι:
Επιλέξτε τον παράγοντα κλίμακας μήκους:
Η θέση μηδέν είναι η χαμηλότερη θέση του ολισθητήρα 5 - η αρχή της υπέρβασης της δύναμης F p.s.
Το κατασκευασμένο σχέδιο της θέσης του μηχανισμού παρουσιάζεται στο φύλλο Νο 1 του γραφικού μέρους της εργασίας του μαθήματος.
Το μήκος των τμημάτων που απεικονίζουν τους συνδέσμους του μηχανισμού στο σχέδιο θα είναι ίσο με:
1.2.1.2 Κατασκευή διαγράμματος μετατόπισης
Το διάγραμμα μετατόπισης του πέμπτου συνδέσμου είναι μια γραφική αναπαράσταση του νόμου της κίνησής του.
Σχεδιάζουμε τους άξονες συντεταγμένων (γραφικό μέρος, φύλλο Νο 1). Στον άξονα της τετμημένης παραμερίζουμε ένα τμήμα
, που αντιπροσωπεύει σε μια κλίμακα το χρόνο T(s) μιας περιόδου (ο χρόνος μιας πλήρους περιστροφής του συνδέσμου εξόδου):Συντελεστής χρονικής κλίμακας:
Αναβάλλουμε την κίνηση του συνδέσμου εξόδου κατά μήκος του άξονα τεταγμένων, το θεωρούμε ως μηδέν - τη χαμηλότερη θέση του ολισθητήρα. Ο συντελεστής κλίμακας θα είναι:
Το κατασκευασμένο διάγραμμα παρουσιάζεται στο φύλλο Νο 1 του γραφικού μέρους της εργασίας του μαθήματος.
1.2.1.3 Σχεδίαση χάρτη ταχύτητας
Η κατασκευή του διαγράμματος ταχύτητας πραγματοποιείται με τη μέθοδο της γραφικής διαφοροποίησης του διαγράμματος γωνίας περιστροφής (με τη μέθοδο των χορδών).
H 1 \u003d 25 mm - η απόσταση από τον πόλο της γραφικής διαφοροποίησης (P 1).
Ο συντελεστής κλιμάκωσης του διαγράμματος γωνιακής ταχύτητας:
Το κατασκευασμένο διάγραμμα ταχύτητας παρουσιάζεται στο φύλλο Νο 1 του γραφικού μέρους του μαθήματος.
1.2.1.4 Κατασκευή διαγράμματος επιτάχυνσης
Η κατασκευή του διαγράμματος επιτάχυνσης πραγματοποιείται με τη μέθοδο της γραφικής διαφοροποίησης του διαγράμματος γωνιακής ταχύτητας.
H 2 \u003d 15 mm - η απόσταση από τον πόλο της γραφικής διαφοροποίησης (P 2).
Συντελεστής κλιμάκωσης του διαγράμματος γωνιακής επιτάχυνσης:
Το κατασκευασμένο διάγραμμα επιτάχυνσης παρουσιάζεται στο φύλλο Νο 1 του γραφικού μέρους του μαθήματος.
Οι πραγματικές τιμές μετατόπισης, ταχύτητας και επιτάχυνσης φαίνονται στον συνοπτικό πίνακα 4.
Πίνακας 4
| Θέση Αρ. | μεγάλο, Μ | v, Κυρία | ένα, m/s 2 |
| 0 | 0,00 | 0,00 | 14,56 |
| 1 | 0,07 | 1,02 | 6,48 |
| 2 | 0,15 | 0,99 | -1,38 |
| 3 | 0,22 | 0,88 | -0,63 |
| 4 | 0,29 | 0,92 | 1,64 |
| 5 | 0,36 | 1,11 | 2,97 |
| 6 | 0,46 | 1,33 | 1,95 |
| 7 | 0,56 | 1,34 | -3,19 |
| 8 | 0,65 | 0,59 | -28,31 |
| 9 | 0,62 | -2,69 | -35,90 |
| 10 | 0,29 | -4,53 | 0,94 |
| 11 | 0,02 | -1,20 | 19,41 |
1.2.2 Γραφική-αναλυτική μέθοδος κινηματικής ανάλυσης
1.2.2.1 Κατασκευή σχεδίου ταχύτητας
Αρχικά δεδομένα:
Γωνιακή ταχύτητα σύνδεσης κίνησης
1. Η απόλυτη ταχύτητα του σημείου A 1 στο τέλος του προπορευόμενου συνδέσμου 1
2. Συντελεστής κλίμακας:
Το μήκος του διανύσματος ταχύτητας του σημείου Α.
Δομική σύνθεση και ανάλυση μηχανισμών
Οι κύριοι τύποι μηχανισμών
Με βάση τις κινηματικές, δομικές και λειτουργικές ιδιότητες, οι μηχανισμοί χωρίζονται σε:
1. Μοχλός(Εικ. 2 α, β) - σχεδιασμένο να μετατρέπει την περιστροφική κίνηση του συνδέσμου εισόδου σε παλινδρομική κίνηση του συνδέσμου εξόδου. Μπορούν να μεταδώσουν μεγάλη δύναμη και δύναμη.
2. Κάμερα(Εικ. 2 γ, δ) - σχεδιασμένο να μετατρέπει την περιστροφική ή παλινδρομική κίνηση του συνδέσμου εισόδου σε παλινδρομική ή παλινδρομική κίνηση του συνδέσμου εξόδου. Δίνοντας στα προφίλ του έκκεντρου και του ωθητή τα κατάλληλα περιγράμματα, είναι πάντα δυνατό να εφαρμοστεί οποιοσδήποτε επιθυμητός νόμος της κίνησης του ωθητή.
3. οδοντωτός(Εικ. 2 στ) - σχηματίζεται με τη βοήθεια γραναζιών. Χρησιμεύει για τη μεταφορά περιστροφής μεταξύ σταθερών και κινούμενων αξόνων. Τα γρανάζια με παράλληλους άξονες πραγματοποιούνται με τη βοήθεια κυλινδρικών γραναζιών, με τεμνόμενους άξονες - με τη βοήθεια κωνικών γραναζιών και με άξονες διασταύρωσης - με τη βοήθεια ενός σκουληκιού και ενός ατέρμονα τροχού.
4. Τριβή(Εικ. 2 ε) - η κίνηση από τον οδηγό σύνδεσμο προς τον οδηγούμενο μεταδίδεται λόγω των δυνάμεων τριβής που προκύπτουν από την επαφή αυτών των συνδέσμων.
Η δομική σύνθεση ενός μηχανισμού ονομάζεται συνήθως η σχεδίαση ενός δομικού διαγράμματος ενός μηχανισμού, ο οποίος αποτελείται από σταθερούς και κινητούς συνδέσμους και κινηματικά ζεύγη. Είναι το αρχικό στάδιο της σύνταξης ενός διαγράμματος ενός μηχανισμού που ικανοποιεί τις δεδομένες συνθήκες. Τα αρχικά δεδομένα είναι συνήθως οι τύποι κίνησης των συνδέσμων οδήγησης και λειτουργίας του μηχανισμού, η σχετική θέση των αξόνων περιστροφής και η κατεύθυνση της μεταφορικής κίνησης των συνδέσμων, οι γωνιακές και γραμμικές κινήσεις, οι ταχύτητες και οι επιταχύνσεις τους. Η πιο βολική μέθοδος για την εύρεση ενός δομικού σχήματος είναι η μέθοδος σύνδεσης δομικών ομάδων Assur σε έναν οδηγό σύνδεσμο ή κύριο μηχανισμό.

Σύμφωνα με τη δομική ανάλυση του μηχανισμού, είναι συνηθισμένο να κατανοείται ο προσδιορισμός του αριθμού των συνδέσμων και των κινηματικών ζευγών, ο προσδιορισμός του βαθμού κινητικότητας του μηχανισμού, καθώς και ο καθορισμός της τάξης και της τάξης του μηχανισμού.
Ο βαθμός κινητικότητας του χωρικού μηχανισμού καθορίζεται από τον τύπο Somov-Malyshev:
W = 6n-(5P 1 +4P 2 + 3P 3 + 2P 4 + P 5) (1)
όπου R 1, R 2, R 3, R 4, P 5 - ο αριθμός των κινηματικών ζευγών ενός, δύο, τριών, τεσσάρων και πέντε κινούμενων. n είναι ο αριθμός των κινούμενων συνδέσμων.
Ο βαθμός κινητικότητας του επίπεδου μηχανισμού καθορίζεται από τον τύπο Chebyshev:
W=3n-2P H - P B (2)
όπου rn είναι ο αριθμός των χαμηλότερων, και P in είναι ο αριθμός των υψηλότερων κινηματικών ζευγών.
Για παράδειγμα, θεωρήστε έναν μηχανισμό διεύθυνσης αυτόματου πιλότου τεσσάρων συνδέσμων (Εικ. 3.3): οι σύνδεσμοι 1 και 2 σχηματίζουν ένα κυλινδρικό ζεύγος της τέταρτης κατηγορίας, το οποίο έχει δύο βαθμούς ελευθερίας. Οι σύνδεσμοι 2-3 και 4-1 σχηματίζουν περιστροφικά ζεύγη της πέμπτης τάξης, που έχουν έναν βαθμό ελευθερίας. Οι σύνδεσμοι 3-4 σχηματίζουν ένα ζευγάρι μπάλας της τρίτης κατηγορίας, με τρεις βαθμούς ελευθερίας. Ο αριθμός των κινούμενων συνδέσμων είναι τρεις, λοιπόν
Π=6 3-2 5-1 4-1 3=1
Ο βαθμός κινητικότητας αυτού του μηχανισμού είναι 1.

Μια κινηματική αλυσίδα, ο αριθμός των βαθμών ελευθερίας της οποίας ως προς τα στοιχεία των εξωτερικών κινηματικών ζευγών της είναι ίσος με μηδέν, ονομάζεται δομική ομάδα Assur, που πήρε το όνομά της από τον L.V. Assur, ο οποίος ήταν ο πρώτος που ερεύνησε θεμελιωδώς και πρότεινε μια δομική ταξινόμηση μηχανισμών επίπεδων ράβδων. Ένα παράδειγμα του σχηματισμού ενός επίπεδου μηχανισμού έξι συνδέσμων δίνεται στο σχ. τέσσερα.

Οι δομικές ομάδες υποδιαιρούνται ανά τάξη και παραγγελία.Η κλάση της ομάδας καθορίζεται από τον μέγιστο αριθμό κινηματικών ζευγών που περιλαμβάνονται σε έναν σύνδεσμο (Εικ. 5).
Η σειρά της ομάδας καθορίζεται από τον αριθμό των στοιχείων με τα οποία συνδέεται η ομάδα στον κύριο μηχανισμό (Εικ. 6).

Η κλάση και η σειρά του μηχανισμού εξαρτώνται από το ποιος σύνδεσμος είναι ο κορυφαίος.
Έχουν τις ίδιες ερευνητικές μεθόδους ανεξάρτητα από τον τομέα εφαρμογής ή τον λειτουργικό σκοπό τους.
Είναι απαραίτητο να γνωρίζουμε τι είναι μια δομική ομάδα (ομάδα Assur), πώς καθορίζονται η τάξη, η σειρά και ο τύπος της. Συνιστάται να θυμάστε έναν πίνακα που δείχνει τον συνδυασμό συνδέσμων και κινηματικών ζευγών της πέμπτης τάξης σε μια ομάδα:
| n ομάδες | 2 | 4 | 6 | 8 | … |
| P 5 ομάδες | 3 | 6 | 9 | 12 | … |
Η λύση του προβλήματος ξεκινά με τον προσδιορισμό του αριθμού των βαθμών ελευθερίας της κινηματικής αλυσίδας που βρίσκεται κάτω από αυτόν τον μηχανισμό. Σύμφωνα με τον αριθμό των βαθμών ελευθερίας, εκχωρείται ο αριθμός των αρχικών συνδέσμων (ή των συνδέσμων εισόδου), μετά τον οποίο η αλυσίδα γίνεται μηχανισμός.
Μετά την ένταξη σε κάθε ομάδα Assur, θα πρέπει να αποκτηθεί ένας ενδιάμεσος μηχανισμός, με τον ίδιο αριθμό βαθμών ελευθερίας που δίνονται. Μετά την προσάρτηση της τελευταίας ομάδας, θα πρέπει να ληφθεί ο αρχικά καθορισμένος μηχανισμός.
Δώστε προσοχή στο γεγονός ότι η κλάση του μηχανισμού (και επομένως οι μέθοδοι επίλυσής του) καθορίζονται όχι μόνο από το σχήμα του μηχανισμού, αλλά και από το ποιος σύνδεσμος λαμβάνεται ως είσοδος. Με το ίδιο σχήμα, αλλά με διαφορετικούς συνδέσμους εισόδου, μπορούν να ληφθούν μηχανισμοί διαφορετικής κατηγορίας και, επομένως, οι μέθοδοι μελέτης τους θα είναι διαφορετικές.
Θα πρέπει επίσης να σημειωθεί ότι η παρουσία ενός μηχανισμού κλειστού βρόχου στο κύκλωμα δεν καθορίζει την κατηγορία του μηχανισμού, καθώς όταν χωρίζονται σε ομάδες Assur, αυτά τα περιγράμματα μπορούν να χωριστούν. Αλλά αν κάποιο περίγραμμα διατηρείται στην ομάδα Assur, τότε καθορίζει την τάξη αυτής της ομάδας, και μέσω της κλάσης της ομάδας, την κατηγορία του μηχανισμού.
Στους μηχανισμούς, μπορεί να προκύψουν διπλοί και πιο περίπλοκοι μεντεσέδες, επομένως πρέπει να είστε προσεκτικοί κατά τον προσδιορισμό του αριθμού των βαθμών ελευθερίας, καθώς και κατά τη διάσπαση του μηχανισμού σε ομάδες Assur.
Έχετε υπόψη σας τα εξής:
- Με το ίδιο σχήμα, μπορείτε να αποκτήσετε διαφορετικούς μηχανισμούς όσον αφορά τις μεθόδους έρευνας εάν ορίσετε διαφορετικούς συνδέσμους ως εισόδους.
- Από τις ίδιες ομάδες Assur είναι δυνατό να συνθέσουμε διαφορετικούς μηχανισμούς με διαφορετικούς λειτουργικούς σκοπούς.
- μια δομική ομάδα (η ομάδα Assur) έχει τις ίδιες ιδιότητες και μεθόδους έρευνας, ανεξάρτητα από τον μηχανισμό που βρίσκεται. Αυτή η πολύ σημαντική ιδιότητα καθιστά δυνατή την ανάπτυξη μεθόδων έρευνας μόνο για τις ομάδες Assur και όχι για κάθε μηχανισμό από τον τεράστιο αριθμό τους.
- Η εξεταζόμενη δομική ταξινόμηση ισχύει όχι μόνο για την ανάλυση υπαρχόντων μηχανισμών, αλλά και για τη σκόπιμη σύνθεση μηχανισμών με προβλέψιμες ιδιότητες (ενώνοντας τις ομάδες Assur στους αρχικούς ή αρχικούς μηχανισμούς και την περαιτέρω διαστρωμάτωση τους).
Εάν ο μηχανισμός έχει δύο βαθμούς ελευθερίας, είναι απαραίτητο να ορίσετε δύο αρχικούς συνδέσμους.
Εάν ο μηχανισμός έχει υψηλότερα κινηματικά ζεύγη κατηγορίας IV, τότε πριν σπάσει ο μηχανισμός σε δομικές ομάδες, είναι απαραίτητο να αντικατασταθούν τα υψηλότερα ζεύγη με αλυσίδες με χαμηλότερα ζεύγη, επειδή Οι ομάδες Assur περιλαμβάνουν μόνο ζευγάρια κατηγορίας V.
Για μεταγενέστερη ανάλυση, συνιστάται η σύγκριση του αριθμού των βαθμών ελευθερίας του συγκεκριμένου μηχανισμού και του μηχανισμού που λαμβάνεται μετά την αντικατάσταση των υψηλότερων ζευγών.
Μπορεί να υπάρχουν επιπλέον βαθμοί ελευθερίας στον μηχανισμό. Ο τύπος για τον προσδιορισμό του αριθμού των βαθμών ελευθερίας δίνει το σωστό αποτέλεσμα για τη γενική περίπτωση, αλλά στη συγκεκριμένη περίπτωση, για ορισμένα μεγέθη συνδέσμων, ο πραγματικός αριθμός βαθμών ελευθερίας μπορεί να διαφέρει από αυτόν που καθορίζεται από τον τύπο.
Συνήθως, η παρουσία ενός στρογγυλού κυλίνδρου δίνει έναν επιπλέον βαθμό ελευθερίας (η περιστροφή του γύρω από τον δικό του άξονα δίνει στον μηχανισμό έναν επιπλέον βαθμό ελευθερίας, αλλά αυτή η κίνηση δεν επηρεάζει τη φύση της λειτουργίας των υπόλοιπων συνδέσμων και ολόκληρου του μηχανισμού. ένα ολόκληρο). Επομένως, ο αριθμός των αρχικών μηχανισμών πρέπει να ρυθμιστεί σύμφωνα με τον πραγματικό αριθμό βαθμών ελευθερίας (W actual = W υπολογισμένο - W περιττό).
Κατά την αντικατάσταση του υψηλότερου ζεύγους, ο επιπλέον βαθμός ελευθερίας εξαφανίζεται αυτόματα (επομένως, μετά την αντικατάσταση του υψηλότερου ζεύγους, η νέα υπολογισμένη τιμή του αριθμού των βαθμών ελευθερίας θα είναι ίση με τον τρέχοντα αριθμό βαθμών ελευθερίας). Αυτό είναι βολικό για τον έλεγχο της ορθότητας της διαπίστωσης της παρουσίας ή απουσίας επιπλέον βαθμών ελευθερίας.
Σε ορισμένες περιπτώσεις, είναι δύσκολο να προσδιοριστεί η κατηγορία των ομάδων Assur και, κατά συνέπεια, ο μηχανισμός σύμφωνα με το κινηματικό σχήμα, καθώς μερικά τρίγωνα εκφυλίζονται σε ευθείες γραμμές, οι πλευρές των περιγραμμάτων μπορούν να αναπαρασταθούν με ολισθητήρες κ.λπ. Ως αποτέλεσμα, είναι αρκετά δύσκολο να προσδιοριστεί η παρουσία ενός κλειστού περιγράμματος σε μια ομάδα και ο αριθμός των πλευρών της. Σε αυτή την περίπτωση, είναι βολικό να χρησιμοποιήσετε την κατασκευή ενός δομικού διαγράμματος ενός μηχανισμού (ή μιας ξεχωριστής ομάδας).
Το μπλοκ διάγραμμα σχεδιάζεται χωρίς κλίμακα, όλοι οι σύνδεσμοι που περιλαμβάνονται σε τρία κινηματικά ζεύγη εμφανίζονται ως άκαμπτα τρίγωνα, οι σύνδεσμοι που περιλαμβάνονται σε τέσσερα κινηματικά ζεύγη εμφανίζονται ως άκαμπτα τετράγωνα κ.λπ., όλοι οι ολισθητήρες αντικαθίστανται υπό όρους από μεντεσέδες. Έτσι, σχηματίζεται ένας άλλος μηχανισμός με την ίδια δομή, αλλά με ένα πιο οπτικό σχήμα για την επίλυση αυτού του προβλήματος. Φυσικά, σε περαιτέρω έρευνα λαμβάνεται υπόψη ο αρχικά καθορισμένος μηχανισμός.
Δομική σύνθεση και ανάλυση μηχανισμών
Δομική σύνθεσηΟ μηχανισμός συνίσταται στο σχεδιασμό του δομικού του διαγράμματος, το οποίο είναι κοινώς κατανοητό ως διάγραμμα μηχανισμού που υποδεικνύει το ράφι, τους κινούμενους συνδέσμους, τους τύπους κινηματικών ζευγών και τη σχετική τους θέση.
Η μέθοδος της δομικής σύνθεσης των μηχανισμών, που προτάθηκε από τον Ρώσο επιστήμονα L. V. Assur το 1914 ᴦ, είναι η εξής: ο μηχανισμός πρέπει να είναι
που σχηματίζεται με την επίστρωση δομικών ομάδων σε έναν ή περισσότερους αρχικούς συνδέσμους και ένα ράφι.
Διαρθρωτική ομάδα(ομάδα Assur) ονομάζεται κινηματική αλυσίδα, ο αριθμός των βαθμών ελευθερίας της οποίας είναι ίσος με μηδέν μετά την προσάρτησή της από εξωτερικά κινηματικά ζεύγη στο ράφι και η οποία δεν διασπάται σε απλούστερες αλυσίδες που ικανοποιούν αυτήν την προϋπόθεση.
Η αρχή της στρώσης απεικονίζεται με το παράδειγμα του σχηματισμού ενός μηχανισμού μοχλού 6 συνδέσμων (Εικ. 1.3).
– γωνία περιστροφής του στρόφαλου (γενικευμένη συντεταγμένη).

Είναι σημαντικό να σημειωθεί ότι για δομικές ομάδες επίπεδων μηχανισμών με χαμηλότερα ζεύγη
![]() , όπου ,
, όπου ,
όπου Wείναι ο αριθμός των βαθμών ελευθερίας. n– αριθμός κινούμενων συνδέσμων. P nείναι ο αριθμός των κατώτερων ζευγών.
Αυτή η αναλογία ικανοποιείται από τους ακόλουθους συνδυασμούς (Πίνακας 1.2)
Τα κατώτερα ζεύγη λειτουργούν ως μονοκίνητα ζεύγη.
| n | … | |||
| P n | … |
Η απλούστερη είναι η δομική ομάδα για την οποία n= 2 και P n= 3. Κοινώς λέγεται δομική ομάδα δεύτερης τάξης.
ΣειράΗ δομική ομάδα καθορίζεται από τον αριθμό των στοιχείων των εξωτερικών κινηματικών ζευγών της, με τα οποία μπορεί να συνδεθεί στον μηχανισμό. Όλες οι ομάδες της δεύτερης κατηγορίας είναι δεύτερης τάξης.
Διαρθρωτικές ομάδες που έχουν n= 4 και P n\u003d 6, υπάρχουν τρίτη ή τέταρτη κατηγορία (Εικ. 12.4)
ΤάξηΗ δομική ομάδα στη γενική περίπτωση καθορίζεται από τον αριθμό των κινηματικών ζευγών σε έναν κλειστό βρόχο που σχηματίζεται από εσωτερικά κινηματικά ζεύγη.
Η κατηγορία ενός μηχανισμού καθορίζεται από την υψηλότερη κατηγορία της δομικής ομάδας που περιλαμβάνεται στη σύνθεσή του.
Η σειρά σχηματισμού ενός μηχανισμού γράφεται ως τύπος για τη δομή του. Για το εξεταζόμενο παράδειγμα (Εικ. 12.3):
μηχανισμός δεύτερης κατηγορίας. Οι ρωμαϊκοί αριθμοί υποδεικνύουν την κατηγορία των δομικών ομάδων και οι αραβικοί αριθμοί δηλώνουν τους αριθμούς των συνδέσμων από τους οποίους σχηματίζονται. Εδώ και οι δύο δομικές ομάδες ανήκουν στη δεύτερη τάξη, στη δεύτερη τάξη, στο πρώτο είδος.
Δομική σύνθεση και ανάλυση μηχανισμών – έννοια και είδη. Ταξινόμηση και χαρακτηριστικά της κατηγορίας «Δομική σύνθεση και ανάλυση μηχανισμών» 2017, 2018.