Sagedusmõõtur - eesmärk, tüübid, kasutusomadused. Sagedusmõõtur - seadmete otstarve ja tüübid Sagedusmõõturi tööpõhimõte
Sagedusmõõtur on elektriline mõõteriist, mis on ette nähtud erinevate perioodiliste elektriliste või mehaaniliste võnkumiste sageduste mõõtmiseks.
Sagedusmõõturite klassifitseerimiseks kasutatakse peamiselt nende tööpõhimõtet (mõõtmist). On olemas otsese hindamise sagedusmõõturid ja sagedusmõõturid, mis töötavad erinevatel võrdlusmeetoditel, näiteks resonants-, heterodüün- ja elektroonsed loendussagedusmõõturid.
Mehaaniliste vibratsioonide mõõtmiseks kasutatakse peamiselt vibratsioonimehaanilist (analoogset). sagedusloendurid, samuti elektriseadmed, mida kasutatakse koos mehaaniliste vibratsioonide muunduritega elektrilisteks või täidab neid funktsioone sagedusmõõtur ise.
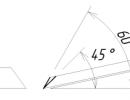
Lihtsaima vibratsiooni mehaanilise sagedusmõõturi tööpõhimõte põhineb resonantsi nähtusel. Seda tüüpi sagedusmõõturid on ühest otsast tugevdatud metallplaatide seeria. Plaadid valitakse nii, et nende vibratsioonid varieeruvad astmeliselt, moodustades seega omamoodi vibratsiooniskaala. Vibratsioonid, mis mõjutavad sagedusmõõtur, põhjustavad plaatina vibratsiooni. Vibratsiooni sagedust mõõdetakse selle elastse plaadi abil, mille omasagedus langeb kokku mõõdetud sagedusega, põhjustades seega resonantsnähtuse.
Elektriliste võnkumiste sageduse mõõtmiseks kasutatakse erinevaid elektroonilisi sagedusmõõtureid.
Näitena saame kirjeldada selle klassi lihtsaima sagedusmõõturi - elektromehaanilise - tööpõhimõtet. Nagu ülalkirjeldatud mehaaniline sagedusmõõtur, sisaldab see seade ka mitmeid elastseid plaate. Seda seadet on aga täiendatud elektromagnetiga. Sissetulevad elektrilised vibratsioonid, mida tuleb mõõta, põhjustavad vibratsiooni elektromagnetis, mis edastab need plaatide seeriale. Seejärel jätkatakse võnkesageduse määramist nagu analoogi puhul sagedusmõõtur.
Elektrodünaamilised sagedusmõõturid. Need sisaldavad spetsiaalset mõõteelementi - ratiomeetrit. See on häälestatud teatud võnkesagedusele. Sõltuvalt sellest, kui palju erinevad sissetulevad vibratsioonid võrdlussagedusest, toimub mõõtmine.
Elektrivibratsiooni mõõtmiseks kasutatavad sagedusmõõturid võivad lisaks loetletutele sisaldada ka elektromagnetilisi ja magnetoelektrilisi seadmeid. Nende tööpõhimõtte kirjeldusel me aga pikemalt ei peatu.
Elektrooniline loendus sagedusmõõtur, on viimasel ajal laiemalt levinud. Selle tööpõhimõte põhineb võnkeperioodide arvu loendamisel kindlaksmääratud aja jooksul.
Raadiosageduste kõikumiste mõõtmiseks kasutatakse spetsiaalset lainetüüpi sagedusmõõtureid. See hõlmab erinevaid resonants-, digitaal- ja heterodüünsagedusloendureid. Kõik need seadmed töötavad ka mõõdetud vibratsioonide loendamise võrdleva meetodiga.
Pealegi kõike sagedusloendurid saab jagada analoog- ja digitaalseadmeteks. Esimesel juhul näidatakse teavet klassikalisel "skaala ja osuti" viisil, teisel juhul - digitaalkuva abil.
Digitaalsed sagedusmõõturid on üsna levinud mõõteriistad, mida kasutatakse paljudes teaduse, tehnoloogia ja tööstuse valdkondades elektriliste signaalide aeg-sageduslike parameetrite hindamiseks. Need töötavad perioodiliste signaalide (või nende perioodide) mõõdetud sageduste väga laias vahemikus.
Kaasaegsed digitaalsed sagedusmõõturid tagavad kõigi teiste digitaalsete mõõteriistade seas kõrgeimad metroloogilised omadused (täpsus ja eraldusvõime), neid iseloomustab üsna suur kiirus, lai funktsionaalsus, töömugavus ja kõrge töökindlus.
Lisaks perioodiliste signaalide aeg-sagedusparameetrite mõõtmisele kasutatakse kaasaegseid digitaalseid sagedusmõõtureid ka erinevate füüsikaliste suuruste mõõtmiseks. Selleks on vaja nendega ühendada lisaprimaarmõõtemuundurid (-andurid), millel on väljundsignaalid, mille sagedus või periood (kestus) on võrdeline mõõdetud väärtusega. Näiteks saab mõõtmiseks kasutada digitaalseid sagedusloendureid mootori võlli pöörlemiskiirus , vedeliku vool ettevalmistamisel, õhuvoolu kiirus . Nad leiavad kasutust ka kui stabiilse sagedusega generaatorid Ja taimerid , püsiv või programmeeritavad ajaintervallid . Lisaks saate digitaalsete sagedusloendurite abil hõlpsasti korrastada impulsside arvu lugemine (ürituste arv).
Peaaegu kõik digitaalsed sagedusmõõturid pakuvad kahte peamist töörežiimi: sageduse mõõtmised Ja perioodi mõõtmised (ajaintervalli kestus).
Sageduse mõõtmise režiim. Digitaalse sagedusmõõturi lihtsustatud struktuur, mis rakendab sageduse mõõtmised , näidatud (joon. 8.22 A) ja selles režiimis töötamise ajastusskeemid on näidatud (joonis 8.22 b). Uuritud perioodiline signaal 1 (vastavalt diagramm 1) juhitakse sisendisse võimendi -piiraja UO, kus teisendatakse ruut pulsirong 2 (skeem 2) fikseeritud amplituud , mille sagedus on võrdne sagedusega f x sisendsignaal . Seejärel läheb see signaal sisendisse elektrooniline võti , mida juhib taimer, mis selle perioodiliselt sulgeb pidev stabiilne ajavahemik 3 (skeem 3), näiteks T 0 = 1c. Nii moodustatud impulsside jada 4 (skeem 4) jõuab kohale loenduri sisend SCH, mille sisu on intervalli alguses 5 T 0 võrdne nulliga , ja loendusintervalli lõpus on võrdne vastuvõetud impulsside arvN x . See number otseselt võrdeline mõõdetud sagedusega f x sisendsignaal;
N x = Ent[T 0 /T x ] = Ent[T 0 f x ],
Kus Ent[...] - [...];T x - sisendsignaali periood (T x = 1/f x ); f x - sisendsagedus .
Loenduri 5 sisu salvestatakse puhvris salvestusseade mälu ja seda hoitakse seal kuni järgmise mõõtmistsükli lõpuni ja rahvaloenduse uus tulemus . Samal ajal saadetakse tulemus digitaalsele lugemisseadmele ( indikaator sisse). Kui näiteks intervalli ajal T 0 = 1c Loenduri sisendis võeti vastu 254 impulssi, seega sisendsignaali sagedus f x = 254Hz. Seade töötab tsükliliselt , st. iga uue tsükli alguses loendur nullitakse . Sel viisil uuendatakse mõõtmistulemust perioodiliselt. Pange tähele, et perioodilise signaali kuju ei oma tähtsust.
Päris digitaalsetel sagedusmõõturitel on mitu sageduse mõõtmisvahemikku, s.t. moodustuvad mitmed erineva kestusega stabiilsed intervallid T 0 (Näiteks, T 01 = 0,1c; T 02 = 1.0c; T 03 = 10c). Töötades digitaalse sagedusmõõturiga sageduse mõõtmise režiimis, on oluline valida õige vahemik, s.o. intervalli valik T 0 , mille käigus loendatakse impulsse. Mida rohkem impulsse N x siseneb loendurisse (muidugi maksimaalsetes piirides) intervallil T 0 , mida rohkem on indikaatoril mõõtetulemuse tähenduslikke numbreid, seda parem. Totaalne viga ∆F f x koosneb kahest komponendist: diskreetsuse vead ∆F 1 ja vead ∆ F 2 põhjustatud ebatäpsus (ebatäiuslikkus) ajaintervalli T seadmine 0 .
Diskreetsuse viga ∆F 1 paratamatult esinevad mis tahes analoogides -digitaalne transformatsioon . Suhtumine T 0 /T x võib olla ükskõik milline, kuna sisendsignaali sagedusel võib olla lõpmatu arv erinevaid väärtusi. On selge, et üldjuhul seos T 0 /T x - murdarv . Ja alates impulsside arvust N x , loenduri järgi loetud, võib-olla ainult terve , siis sellise automaatse ümardamise käigus tekib diskreetsuse viga .
Intervalli samal konstantsel väärtusel T 0 , olenevalt sisendsignaali asukohast (juhuslikust) ajas ja intervallist T 0 , impulsside arv intervalli kohta T 0 , võivad ühes või teises suunas erineda ühiku kohta . Kaks erinevat olukorda samadel algtingimustel on näidatud (joonis 8.23, A): esimesel juhul (diagramm 1) on loenduri poolt vastuvõetud impulsside arv viis ja teisel (diagramm 2) juhul on impulsside arv kuus.

Viga ∆ F 1 - juhuslik väärtus , kuna sisendsignaal ja taimeri signaal pole omavahel seotud . Selle vea maksimaalne võimalik väärtus jääb muutumatuks ja on üks väike üksus - üks kvant:
∆F 1 = ±1 impulss = ±1 /T 0 .
Seega ∆ F 1 - See aditiivne viga , st. sõltumata mõõdetud suuruse väärtusest - sagedused f x (Joon. 8.23 b).
Viga ∆ F 2 , põhjustatud ebatäpsusest (ebatäiuslikkus) intervalli seadistus T 0 , näidatud (joonis 8.24 A). Kui intervalli kestus T 0 oli rangelt nominaalväärtus , siis oleks loenduri poolt vastuvõetud impulsside arv võrdne N 1 (vt joonis 8.24 A). Kui intervall T 0 tahe veidi rohkem kui nominaalne ja ulatub T 0 + ∆T 0 , siis samal mõõdetud sagedusel f x loendurile saadetakse rohkem impulsse: N 2 > N 1 (vt joonis 8.24 b).

Määramatus ∆ T 0 selle intervalli seadmine viib välimuseni korduv , st. lineaarselt sõltuv mõõdetud sageduse väärtusest f x , komponent:
∆F 2 = ± f x ∆T 0 /T 0 .
Kokku absoluutne viga ∆F sageduse mõõtmise tulemus f x ja kokku suhteline viga δ F vastavalt , %;
∆F = ∆F 1 + ∆F 2 = ±;
δ F = δ F 1 + δ F 2 = ±.
Graafiline illustratsioon komponentide käitumisest ning sagedusmõõtmise tulemuse absoluut- ja suhtevigade summaarsest f x näidatud (joon. 8.25 A ja 8.25 b) vastavalt.

Vaatleme näidet sageduse mõõtmise tulemuse vigade määramisest. Oletame, et me teame intervalli väärtusi T 0 = 1c ja selle seadistuse ∆ võimalik viga T 0 = ±2 Prl. Sagedusmõõtmise tulemus vastu võetud f x = 1kHz.
Absoluutse aditiivse ∆ väärtused F 1 ja kordav ∆ F 2 vead vastavalt, Hz:
∆F 1 = ±1 /T 0 = ±1; f x ∆T 0 /T 0 = ±1000 ∙ 2∙ 10 ‒3 / 1 = ±2.
Suhtelise lisandi δ väärtused F 1 , ja kordav δ F 2 vead, %, määratakse tavalisel viisil:
δ F 1 = (∆F 1 /f x )100 = ±(1 / 1000)100 = ±0,1;
δ F 2 = (∆F 2 /f x )100 = ±(2 / 1000) 100 = ±0,2.
Absoluutne summaarne ∆ F Hz ja suhteline δ F %, sagedusmõõtmise tulemuse viga f x vastavalt:
∆F = ∆F 1 + ∆F 2 = ±3;
δ F = δ F 1 + δ F 2 = ±3.
Perioodi mõõtmise režiim. Digitaalse sagedusmõõturi lihtsustatud struktuur perioodi mõõtmise režiimis on näidatud (joonis 8.26 A) ja ajastusskeemid on näidatud (joonis 8.26 b). Selles režiimis suunatakse sisendisse mis tahes kujuga perioodiline sisendsignaal 1 (vastavalt diagramm 1). perioodi kujundaja FP, kus see teisendatakse ruutlaine signaaliks 2 (skeem 2) fikseeritud amplituud , mille kestus T x võrdne sisendsignaali periood .

Järgmisena saadetakse see signaal elektroonilise võtme juhtsisendisse ja sulgeb selle mõneks ajaks T x . Elektroonilise võtme sisendis - stabiilse teadaoleva sagedusega ristkülikukujulised impulsid 3 (skeem 3) F 0 , mis tuleb pidevalt väljundist kella generaator GTI. Seega moodustub klahvi väljundis rida ristkülikukujulisi impulsse 4 (skeem 4), milles impulsside arv N x proportsionaalne kestusega T x :
N x = Ent[T x/T 0 ] = Ent[TxF 0 ],
Kus Ent[...] - väljendite operaator [...]; T 0 - kella periood .
See seeria sisestatakse mäluseadmesse, kus see salvestatakse kuni järgmise tsükli lõpuni ja uue tulemuse salvestamiseni.
In-indikaator võimaldab lugeda mõõtmistulemust. Kui näiteks taktimpulsi sagedus on seadistatud F 0 = 1kHz, ja loenduri Сч sisu loendusintervalli lõpus osutus võrdseks N x = 1520, siis sisendsignaali periood T x = 1,52c.
Ja selles režiimis töötab digitaalne sagedusloendur tsükliliselt , st. iga uue konversioonitsükli alguses loendurit lähtestab nulli . Seega uuendatakse mõõtmistulemust perioodiliselt.
Tavalisel digitaalsel sagedusmõõturil on kõrgsageduslik stabiilne kellageneraator ja digitaalne sagedusjagur, mis genereerib mitut erinevat taktsagedust F 0 (Näiteks, F 01 = 1.0kHz; F 02 = 10kHz; F 03 = 100kHz; F 04 = 1,0MHz), mis tähendab, et perioodi mõõtmiseks on mitu võimalikku vahemikku.
Viga ∆Perioodi mõõtmise tulemuse T (ajavahemik) T x , nagu sageduse mõõtmise režiimis, sisaldab kahte komponenti: diskreetne viga ∆ T 1 ja viga ∆ T 2 , mille põhjuseks on väärtuse ebatäpsus (mitteideaalsus). F 0 kella sagedus.
Diskretiseerimisviga ∆ T 1 , on olemuselt sarnane esimeses režiimis vaadeldavaga ja tähistab aditiivne viga (Joon. 8.27 A). Teise komponendi välimus - vead ∆ T 2 põhjustatud ebatäpsusest (mitteideaalsusest) illustreerib (joon. 8.27 b).

Kui taktsignaali sagedus oleks rangelt võrdne nominaalsagedusega F 0 , siis loenduri poolt intervalli jooksul vastuvõetud impulsside arv T x , oleks see võrdne N 1 . Kui taktimpulsi generaatori signaali sagedus on näiteks nominaalsest veidi kõrgem ja on F 0 + ∆F 0 , siis samal intervallil T x loendurisse siseneb rohkem impulsse: N 2 > N 1 . See veakomponent on korduv, st. selle väärtus on suurem, mida pikem on mõõdetud perioodi kestus (intervall) T (joonis 8.27 c).
Absoluutne koguviga ∆ T perioodi mõõtmise tulemus T x ja suhteline koguviga δ T % vastavalt:
∆T = ∆T 1 + ∆T 2 = ±;
δ T = δ T 1 + δ T 2 = ±(1 /F 0 T x + ∆F 0 /F 0 ).
Perioodi mõõtmistulemuse üksikkomponendid ja koguvead T x vastavalt absoluut- ja suhtelisel kujul on graafiliselt esitatud (joonis 8.28). Selles režiimis, seda lühem on mõõdetud periood T x (seda kõrgem on sageduse väärtus f x ), seda hullem, sest seda suurem on suhteline viga. Perioodi suhteliselt väikeste väärtuste mõõtmiseks T x (või suhteliselt kõrgetel sagedustel), peaksite kasutama digitaalse sagedusmõõturi esimest režiimi - sageduse mõõtmise režiimi.

Kontrollküsimused
1 Milliste füüsikaliste suuruste mõõtmiseks kasutatakse lisaks aeg-sagedus parameetrite mõõtmisele digitaalseid sagedusmõõtureid?
2 Kuidas digitaalne sagedusloendur sageduse mõõtmise režiimides töötab?
3 Millised vead tekivad, kui digitaalne sagedusmõõtur töötab sageduse mõõtmise režiimides?
4 Kuidas digitaalne sagedusloendur perioodi mõõtmise režiimides töötab?
5 Millised vead tekivad, kui digitaalne sagedusmõõtur töötab perioodi mõõtmise režiimides?
Seotud Informatsioon.
Tavalisteks tööstuslikeks toodete ja toorainete arvestuseks on kaubad, autod, vankrid, kärud jne. Tehnoloogilisi kasutatakse toodete kaalumiseks tootmise käigus tehnoloogiliselt pidevates ja perioodilistes protsessides. Laboratoorseid analüüse kasutatakse materjalide ja pooltoodete niiskusesisalduse määramiseks, tooraine füüsikaliste ja keemiliste analüüside läbiviimiseks ja muuks otstarbeks. On tehnilisi, eeskujulikke, analüütilisi ja mikroanalüütilisi.
Neid saab jagada mitmeks tüübiks olenevalt füüsikalistest nähtustest, millel nende tööpõhimõte põhineb. Levinumad seadmed on magnetoelektrilised, elektromagnetilised, elektrodünaamilised, ferrodünaamilised ja induktsioonsüsteemid.
Magnetoelektrilise süsteemi seadme skeem on näidatud joonisel fig. 1.
Fikseeritud osa koosneb magnetist 6 ja magnetahelast 4, millel on poolusdetailid 11 ja 15, mille vahele on paigaldatud rangelt tsentreeritud terassilinder 13. Silindri ja poolusetükkide vahesse, kuhu on koondunud ühtlane radiaalselt suunatud suund. , asetatakse õhukesest isoleeritud vasktraadist valmistatud raam 12.
Raam on paigaldatud kahele teljele, mille südamikud 10 ja 14 toetuvad tõukelaagritele 1 ja 8. Vastuvedrud 9 ja 17 toimivad voolujuhtmetena, mis ühendavad raami mähise seadme elektriahela ja sisendklemmidega. Teljel 4 on osuti 3 tasakaalustusraskuste 16 ja vastassuunalise vedruga 17, mis on ühendatud korrektori hoova 2 külge.
01.04.2019
1. Aktiivradari põhimõte.
2. Impulssradar. Toimimispõhimõte.
3. Impulssradari töö põhilised ajasuhted.
4.Radari orientatsiooni tüübid.
5. PPI radaril pühkimise moodustumine.
6. Induktsiooni viivituse tööpõhimõte.
7. Absoluutsete viivituste tüübid. Hüdroakustiline Doppleri logi.
8.Lennuandmete salvesti. Töö kirjeldus.
9. AISi eesmärk ja tööpõhimõte.
10. Edastatud ja vastu võetud AIS-teave.
11. Raadioside korraldamine AIS-is.
12. Laeva AIS-seadmete koosseis.
13. Laeva AIS-i ehitusskeem.
14. SNS GPS-i tööpõhimõte.
15. Diferentsiaalse GPS-režiimi olemus.
16. GNSSi vigade allikad.
17. GPS-vastuvõtja plokkskeem.
18. ECDISi kontseptsioon.
19. ENC klassifikatsioon.
20.Güroskoobi otstarve ja omadused.
21. Gürokompassi tööpõhimõte.
22. Magnetkompassi tööpõhimõte.
Ühenduskaablid— tehnoloogiline protsess kahe kaablilõigu vahelise elektriühenduse loomiseks koos kõigi kaabli kaitse- ja isolatsioonikestade taastamisega ning ristmikul ekraanipunutised.
Enne kaablite ühendamist mõõdetakse isolatsioonitakistus. Varjestamata kaablite puhul ühendatakse mõõtmise hõlbustamiseks üks megohmomeetri klemm kordamööda iga südamikuga ja teine - ülejäänud üksteisega ühendatud südamike külge. Iga varjestatud südamiku isolatsioonitakistust mõõdetakse juhtmete ühendamisel südamiku ja selle ekraaniga. , mis saadakse mõõtmiste tulemusel, ei tohi olla väiksem kui antud kaablimargi jaoks kehtestatud standardväärtus.
Pärast isolatsioonitakistuse mõõtmist jätkatakse kas südamike nummerdamise või paigaldussuundade määramisega, mis on näidatud nooltega ajutiselt kinnitatud siltidel (joonis 1).
Pärast ettevalmistustöö lõpetamist võite alustada kaablite lõikamist. Kaabli otste lõike geomeetriat muudetakse, et tagada südamike ja ümbrise isolatsiooni taastamise mugavus ning mitmesooneliste kaablite puhul ka kaabliühenduse vastuvõetavate mõõtmete saamiseks.
PRAKTILISE TÖÖ METOODILINE JUHEND: “SPP JAHUTUSSÜSTEEMIDE TÖÖ”
DISTSIPLIINI JÄRGI: " TOITESEADMETE KASUTAMINE JA KELLA OHUTU HOIDMINE MOOTORIRUUMIS»
JAHUTUSSÜSTEEMI TÖÖ
Jahutussüsteemi eesmärk:
- soojuse eemaldamine peamasinast;
- soojuse eemaldamine abiseadmetest;
- OS-i ja muude seadmete soojusvarustus (GD enne käivitamist, VDG hooldus "kuuma" reservi jne);
- merevee sissevõtmine ja filtreerimine;
- Kingstoni kastide puhumine suvel välja, et vältida nende ummistumist meduuside, vetikate ja mustusega, ning talvel jää eemaldamiseks;
- jääkirstude töö tagamine jne.
Sagedusmõõtur seade perioodiliste protsesside (võnkumiste) sageduse mõõtmiseks. Mehaaniliste vibratsioonide sagedust mõõdetakse tavaliselt vibreerivate mehaaniliste sageduste ja elektriliste sageduste abil, mida kasutatakse koos mehaaniliste vibratsioonide elektrilisteks muunduritega. Lihtsaim vibratsiooniline mehaaniline impulss, mille toime põhineb resonantsil, on elastsete plaatide seeria, mis on fikseeritud ühes otsas ühisele alusele. Plaadid valitakse pikkuse ja kaalu järgi nii, et nende enda vibratsiooni sagedused moodustaksid teatud diskreetse skaala, millelt määratakse mõõdetud sageduse väärtus. Plaadi alusele mõjuvad mehhaanilised vibratsioonid põhjustavad elastsete plaatide vibratsiooni, mille vibratsiooni suurim amplituudiga on täheldatud plaadil, mille loomulik vibratsiooni sagedus on võrdne (või väärtuselt lähedane) mõõdetud sagedusega. Elektriliste võnkumiste sageduse mõõtmiseks kasutatakse elektromehaanilisi, elektrodünaamilisi, elektroonilisi, elektromagnetilisi ja magnetoelektrilisi impulsse.Vibratsioonitüüpi kõige lihtsam elektromehaaniline impulss koosneb elektromagnetist ja mitmest elastsest plaadist (nagu mehaanilisel impulssil) ühisel pinnal. elektromagneti armatuuriga ühendatud alus ( riis. 1
). Mõõdetud elektrilised vibratsioonid juhitakse elektromagneti mähisesse; Sel juhul tekkivad armatuuri vibratsioonid kanduvad edasi plaatidele, mille vibratsioon määrab mõõdetud sageduse väärtuse. Elektrodünaamilistes sagedustes on põhielemendiks ratiomeeter, mille üks haru sisaldab võnkeahelat, mis on pidevalt häälestatud antud seadme mõõtmisvahemiku keskmisele sagedusele ( riis. 2
). Kui selline sagedus on ühendatud mõõdetud sagedusega vahelduvvoolu elektriahelaga, kaldub ratiomeetri liikuv osa kõrvale nurga võrra, mis on võrdeline ratiomeetri mähistes olevate voolude faasinihkega, mis sõltub mõõdetud sageduse suhtest. ja võnkeahela resonantssagedus. Elektrodünaamiliste mõõtmiste viga on 10 -1 -5·10 -2. Elektromagnetiliste võnkumiste sagedust raadiosagedus- ja mikrolainevahemikus mõõdetakse elektrooniliste sageduste (lainemõõtja) abil. -
resonants, heterodüün, digitaalne jne. Resonantssageduse toime põhineb mõõdetud sageduse võrdlemisel mõõdetud sagedusega resonantsile häälestatud elektriahela (või mikrolaineresonaatori) omasagedusega. Resonantssagedus koosneb elektromagnetilisi võnkumisi (raadiolaineid) tajuva sideahelaga võnkeahelast, detektorist, võimendist ja resonantsindikaatorist ( riis. 3
). Mõõtmisel häälestatakse vooluahel kalibreeritud kondensaatori (või mikrolainepiirkonnas asuva resonaatori kolvi) abil tajutavate elektromagnetiliste võnkumiste sagedusele kuni resonantsi tekkimiseni, mis registreeritakse indikaatori osuti suurima kõrvalekaldega. Mõõtmisviga on selline 5. osa. 10 ―3 -5·10 ―4. Heterodüüni sagedustel võrreldakse mõõdetud sagedust standardse generaatori - heterodüüni - teadaoleva sagedusega (või selle harmoonilistega). .
Kohandada lokaalset ostsillaatori sagedust mõõdetud võnkumiste sagedusega mikseri väljundis (kus sagedusi võrreldakse), tekivad löögid, mida peale võimendamist näitab osutiseade, telefon või (harvemini) ostsilloskoop. Heterodüüni osade suhteline viga 5·10 ―4 -5·10 ―6. Laialdaselt on kasutusele võetud digitaalsed kellad, mille tööpõhimõte on lugeda mõõdetud võnkumiste perioodide arvu teatud aja jooksul. Elektrooniline loendusseade koosneb formeerimisseadmest, mis teisendab mõõdetud sageduse siinuspinge unipolaarsete impulsside jadaks ja ajutisest impulsi valijast, mis avatakse teatud ajaks (tavaliselt 10–4 kuni 10). sek), elektrooniline loendur, mis loendab impulsside arvu selektori väljundis, ja digitaalne indikaator. Kaasaegsed digitaalsed sagedused töötavad sagedusvahemikus 10 - 4 - 10 9 Hz, suhteline mõõtmisviga 10 – 9 – 10 – 11; tundlikkus 10 ―2 V. Selliseid sagedusi kasutatakse peamiselt raadioseadmete testimisel ja erinevate mõõtemuundurite kasutamisel (vt Mõõteandur) -
temperatuuri, vibratsiooni, rõhu, deformatsiooni ja muude füüsikaliste suuruste mõõtmiseks. Kõrgeima täpsusega eeskujulike sageduste liik on standardid ja sagedusstandardid, mille viga jääb vahemikku 10 -12 -5. 10-14 . Tahhomeetrit kasutatakse masinate ja mehhanismide võllide pöörlemiskiiruse mõõtmiseks. Lit.: Mirsky G. Ya., Radioelectronic mõõtmised, 3. väljaanne, M., 1975; Kushnir F.V., Raadiotehnika mõõtmised, 3. väljaanne, M., 1975. E. G. Bilyk. Riis. 2. Elektrodünaamilise sagedusmõõturi skeem: K - kahest identsest osast moodustatud ratiomeetri fikseeritud mähis ühtlase magnetvälja loomiseks; K 1 ja K 2 - liikuvad mähised, mis on jäigalt kinnitatud 90° nurga all ja interakteeruvad mähisega K; C, L, R - võnkeahela elektriline mahtuvus, induktiivsus ja takistus; C 1 - kondensaator, mis tagab faasinihke (90°) U ja I 1 vahel; U - pinge, mille sagedust mõõdetakse; I ja I 1 - voolud logomeetri harudes. Riis. 3. Elektrilise resonantssagedusmõõturi skeem: L sv - ühenduse silmus (mähis); L, C - võnkeahel (C - kalibreeritud muutuv kondensaator); D - detektor (pooljuhtdiood); U - võimendi; I - indikaator (mikroampermeeter, millivoltmeeter).

Suur Nõukogude entsüklopeedia. - M.: Nõukogude entsüklopeedia. 1969-1978 .
Sünonüümid:Vaadake, mis on "sagedus" teistes sõnaraamatutes:
Sagedusmõõtur... Õigekirjasõnastik-teatmik
Seade perioodiliste protsesside (võnkumiste) sageduse mõõtmiseks. Näiteks mõõdetakse mehaaniliste vibratsioonide sagedust vibratsiooni- ja elektrisagedusmõõturiga (koos mehaaniliste vibratsioonide muunduritega elektrilisteks), sagedus ... ... Suur entsüklopeediline sõnaraamat
SAGEDUSMÕÕTJA, sagedusmõõtur, meessoost. (need.). Seade elektrivoolu sageduse mõõtmiseks. Ušakovi seletav sõnaraamat. D.N. Ušakov. 1935 1940 ... Ušakovi seletav sõnaraamat
Seade perioodilisuse sageduse mõõtmiseks. protsessid (peamine arr. elektriliste signaalide sagedus). Eristage osad ja elektriarvestid. mehhanismid, elektrooniline analoog ja digitaalne Ch. Üks lihtsamaid nähtusi. Vibratsiooni elektrilise mõõtemehhanismiga kanal..... ... Füüsiline entsüklopeedia
- (Frequency meter) seade vahelduvvoolu sageduse mõõtmiseks. Disaini järgi on vibratsioon (kõige tavalisem) ja voltmeeter. Samoilov K.I. Meresõnaraamat. M. L.: NSVL NKVMF Riiklik Mereväe Kirjastus, ... ... Meresõnastiku tehniliste tõlkijate kataloog
Seade perioodiliste mehaaniliste, elektriliste ja elektromagnetiliste võnkumiste sageduse mõõtmiseks. Mehaaniliste vibratsioonide mõõtmiseks kasutatakse vibratsioonisageduse mõõtjaid. Lihtsaim mehaaniline vibratsioonisagedusmõõtur on ... ... Tehnoloogia entsüklopeedia
Seade perioodilisuse sageduse mõõtmiseks. protsessid (võnkumised). Lai valik mõõdetud sagedusi (tuhandik Hz kuni kümnete GHz) ja lubatud mõõtmisvead (ühikutest kuni 10 8%) määrab Ch. mitmekesisuse (vt Vibratsiooni ... ... Suur entsüklopeediline polütehniline sõnaraamat
- (vale sagedusmõõtur) mõõteseade perioodilise protsessi sageduse või signaalispektri harmooniliste komponentide sageduste määramiseks. Sisu 1 Klassifikatsioon 2 Elektrooniliselt arvutavad sagedusmõõturid ... Vikipeedia
Perioodiliste signaalide sageduste määramiseks, samuti spektrite harmooniliste komponentide tuvastamiseks kasutatakse spetsiaalseid raadiomõõte- (ja elektrimõõte) seadmeid, mida nimetatakse sagedusmõõturiteks.
Praeguseks on mõõtmismeetodi järgi kahte tüüpi sagedusmõõtureid: analoog (sageduse vahetuks hindamiseks) ja võrdlusseadmed (mille hulka kuuluvad: elektrooniline loendus, heterodüün, resonants jne).
Analoogsed sobivad siinusvõnkumiste uurimiseks, heterodüün-, resonants- ja vibratsioonilised - signaali harmooniliste komponentide mõõtmiseks, elektrooniline loendus ja kondensaator - diskreetsete sündmuste sageduste määramiseks.
Vastavalt konstruktsiooni tüübile võivad sagedusmõõturid olla paneel-, teisaldatavad või statsionaarsed, - konstruktsiooni tüüp sõltub konkreetse seadme kasutusalast.

Osuti analoogsagedusmõõtur kuulub elektromehaaniliste mõõteriistade hulka ning töötab põhimõttel magnetoelektriline, elektromagnetiline või.
Sellise seadme töö põhineb komposiitmõõteahela kogutakistuse mooduli sõltuvusel seda läbiva voolu parameetritest. Seadme mõõteahel koosneb sagedusest sõltuvatest ja sagedusest sõltumatutest takistustest.
Seega antakse suhemõõturi õlgadele erinevaid signaale: mõõdetud vool antakse ühte õlale läbi sagedusest sõltumatu ahela, teisele sagedusest sõltuva ahela kaudu. Selle tulemusena paigaldatakse seadme nõel asendisse, kus kahe haru läbivad voolude magnetilised voolud leiavad tasakaalu.
Sellel põhimõttel töötava sagedusmõõturi näide on Nõukogude M800, mis on konstrueeritud mobiilsete ja statsionaarsete objektide ahelates vahemikus 900–1100 Hz. Seadme tarbitav võimsus on 7 vatti.

Pilliroo vibratsioonisagedusmõõturi skaalal on elastse terasroo kujul olevate plaatide komplekt ja igal pillirool on oma mehaaniliste vibratsioonide resonantssagedus. Roostiku resonantsvõnked ergastuvad elektromagneti vahelduva magnetvälja toimel.
Kui analüüsitav vool läbib elektromagnetahelat, hakkab voolusagedusele lähima resonantssagedusega pilliroog suurima amplituudiga võnkuma. Iga pilliroo resonantsvibratsiooni sagedus peegeldub seadme skaalal. Seega on visuaalne näit üsna selge.
Vibratsiooniroo sagedusmõõturi näiteks on seade B80, mida kasutatakse vahelduvvooluahelates sageduse mõõtmiseks. Sagedusvahemik on 48-52 Hz, sagedusmõõturi voolutarve on 3,5 W.
Kondensaatori sagedusmõõtur

Tänapäeval leiate kondensaatorite sagedusmõõtureid vahemike 10 Hz kuni 10 MHz jaoks. Nende seadmete tööpõhimõte põhineb vahelduvatel kondensaatori laadimis- ja tühjendusprotsessidel. Kondensaatorit laetakse akust, seejärel tühjendatakse see elektromehaanilisse süsteemi.
Laadimise-tühjenemise korduste sagedus langeb kokku uuritava signaali sagedusega, kuna mõõdetud signaal määrab ise lülitusimpulsi. Teame, et CU laeng voolab ühes töötsüklis, seetõttu on magnetoelektrisüsteemi läbiv vool võrdeline sagedusega. Seega on amprid võrdelised hertsiga.
21 mõõtepiirkonnaga kondensaatori sagedusmõõturi näide on F5043 seade, mida kasutatakse madalsageduslike seadmete häälestamiseks. Minimaalne mõõdetav sagedus on 25 Hz, maksimaalne 20 kHz. Seadme tarbimine töörežiimis ei ületa 13 W.

Transiiverseadmete seadistamiseks ja teenindamiseks ning moduleeritud signaalide kandesageduste mõõtmiseks on kasulikud heterodüünsagedusloendurid. Uuritava signaali sagedust võrreldakse lokaalse ostsillaatori signaali sagedusega (häälestav abiostsillaator), kuni saavutatakse nulllöögid.
Nulllöögid näitavad, et uuritava signaali sagedus langeb kokku kohaliku ostsillaatori sagedusega. Ajakontrollitud heterodüünsagedusmõõturi näide on toru “Wavemeter Ch4-1”, mida kasutatakse pideva võnkumisega töötavate saatjate ja vastuvõtjate kalibreerimiseks. Seadme töövahemik on 125 kHz kuni 20 MHz.
Häälestatava resonaatori sagedust võrreldakse uuritava signaali sagedusega. Resonaator on võnkeahel, õõnsusresonaator või veerandlaine joonesegment. Uuritav signaal suunatakse resonaatorisse ja resonaatori väljundist läheb signaal galvanomeetrisse.
Maksimaalsed galvanomeetri näidud näitavad resonaatori omasageduse ja uuritava signaali sageduse parimat vastavust. Operaator reguleerib resonaatorit valikukettaga. Mõned resonantssagedusloendurite mudelid kasutavad tundlikkuse suurendamiseks võimendeid.

Resonantssagedusmõõturi näide on seade Ch2-33, mis on mõeldud vastuvõtjate ja saatjate häälestamiseks pidevate ja impulssmoduleeritud signaalide sagedustega 7–9 GHz. Seadme tarbimine ei ületa 30 vatti.
Elektrooniline loendussagedusmõõtur loeb lihtsalt impulsside arvu. Loendatud impulsid genereerivad sisendahelad suvalise kujuga perioodilisest signaalist. Sellisel juhul määratakse loendusaja intervall seadme kvartsostsillaatori põhjal. Seega on elektrooniline loendussagedusmõõtur võrdlusseade, mille täpsus sõltub standardi kvaliteedist.
Elektroonilised sagedusloendurid on väga mitmekülgsed seadmed, mida iseloomustavad laiad sageduste mõõtmisvahemikud ja kõrge täpsus. Näiteks seadme Ch3-33 mõõtmisvahemik on 0,1 Hz kuni 1,5 GHz ja täpsus on 0,0000001. Saadaolevad mõõdetavad sagedused suurenevad kümnete gigahertsini tänu jaoturite kasutamisele kaasaegsetes instrumentides.

Üldiselt on elektroonilised sagedusloendurid selleks otstarbeks kõige levinumad ja nõutumad professionaalsed seadmed. Need mitte ainult ei võimalda mõõta sagedusi, vaid võimaldavad leida ka impulsside kestust ja nendevahelisi intervalle ning isegi arvutada sageduste vahelist seost, rääkimata impulsside arvu lugemisest.