Mehaanilised vibratsioonid. Võnkuva liikumise parameetrid. Mehaanilised vibratsioonid (põhikool) Mehaanilise vibratsioonilise liikumise mõiste
(või loomulikud vibratsioonid) - need on võnkesüsteemi vibratsioonid, mis tekivad ainult algselt edastatud energia (potentsiaalse või kineetilise) tõttu välismõjude puudumisel.
Potentsiaalset või kineetilist energiat saab edastada näiteks mehaanilistes süsteemides algnihke või algkiiruse kaudu.
Vabalt vibreerivad kehad suhtlevad alati teiste kehadega ja moodustavad koos nendega kehade süsteemi, mida nimetatakse võnkesüsteem.
Näiteks vedru, kuul ja püstik, mille külge on kinnitatud vedru ülemine ots (vt joonist allpool), kuuluvad võnkesüsteemi. Siin libiseb pall vabalt mööda nööri (hõõrdejõud on tühine). Kui võtate palli paremale ja jätate selle endale, vibreerib see vabalt ümber tasakaaluasendi (punktid O) tasakaaluasendi poole suunatud vedru elastsusjõu toimel.
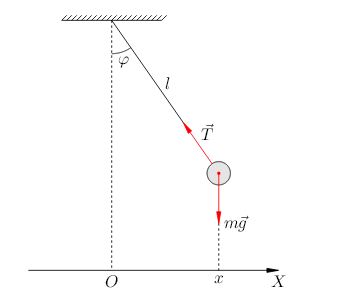
Teine klassikaline näide mehaanilisest võnkesüsteemist on matemaatiline pendel (vt joonist allpool). Sel juhul teostab pall kahe jõu mõjul vabu vibratsioone: gravitatsioonijõud ja niidi elastsusjõud (võnkesüsteemi siseneb ka Maa). Nende resultant on suunatud tasakaaluasendisse.

Võnkusüsteemi kehade vahel mõjuvaid jõude nimetatakse sisemised jõud. Välised jõud nimetatakse süsteemile mittekuuluvate kehade küljelt mõjuvaid jõude. Sellest vaatenurgast vaadatuna saab vabu vibratsioone defineerida kui võnkumisi süsteemis sisejõudude mõjul pärast seda, kui süsteem on tasakaaluasendist välja viidud.
Vaba vibratsiooni tekkimise tingimused on järgmised:
1) nendes jõu tekkimine, mis viib süsteemi pärast selle seisundist väljaviimist tagasi stabiilsesse tasakaaluasendisse;
2) hõõrdumise puudumine süsteemis.
Vabade vibratsioonide dünaamika.
Keha vibratsioon elastsusjõudude mõjul... Keha vibratsioonilise liikumise võrrand elastsusjõu mõjul F() on võimalik saada, võttes arvesse Newtoni teist seadust ( F = mа) ja Hooke'i seadus ( F ctrl = -kx), kus m on kuuli mass ja kiirendus, mille kuul saavutab elastse jõu mõjul, k- vedru jäikuse koefitsient, X- keha nihkumine tasakaaluasendist (mõlemad võrrandid on kirjutatud projektsioonis horisontaalteljele Oh). Võrdsustades nende võrrandite paremad pooled ja võttes arvesse, et kiirendus a On koordinaadi teine tuletis X(nihe), saame:
 .
.
Samamoodi kiirenduse avaldis a saame, eristades ( v = -v m sin ω 0 t = -v m x m cos (ω 0 t + π / 2)):
a = -a m cos ω 0 t,
kus a m = ω 2 0 x m- kiirenduse amplituud. Seega on harmooniliste võnkumiste kiiruse amplituud võrdeline sagedusega ja kiirenduse amplituud võrdeline võnkesageduse ruuduga.
USE kodifitseerija teemad: harmoonilised võnked; võnkumiste amplituud, periood, sagedus, faas; vabavõnked, sundvõnked, resonants.
Kõikumised - need on ajas korduvad muutused süsteemi olekus. Vibratsiooni mõiste hõlmab väga suurt hulka nähtusi.
Mehaaniliste süsteemide kõikumised või mehaanilised vibratsioonid- See on keha või kehade süsteemi mehaaniline liikumine, millel on ajas korratavus ja mis toimub tasakaaluasendi läheduses. Tasakaaluasend nimetatakse süsteemi olekuks, milles see võib püsida meelevaldselt pikka aega ilma väliseid mõjutusi kogemata.
Näiteks kui pendel kaldub kõrvale ja vabastatakse, siis algavad võnked. Tasakaaluasend on pendli asend läbipainde puudumisel. Selles asendis võib pendlit, kui seda ei puudutata, jääda määramata ajaks. Võnkumisel läbib pendel tasakaaluasendit mitu korda.
Kohe pärast kõrvalekaldud pendli vabastamist hakkas see liikuma, ületas tasakaaluasendi, jõudis vastupidisesse äärmisse asendisse, peatus seal hetkeks, liikus vastassuunas, möödus uuesti tasakaaluasendist ja pöördus tagasi. Üks asi juhtus täies hoos... Lisaks korratakse seda protsessi perioodiliselt.
Keha vibratsiooni amplituud on selle suurima kõrvalekalde väärtus tasakaaluasendist.
Võnkeperiood - see on ühe täieliku võnkumise aeg. Võib öelda, et perioodi jooksul läbib keha nelja amplituudiga tee.
Võnkesagedus on perioodi pöördväärtus:. Sagedust mõõdetakse hertsides (Hz) ja see näitab, mitu täielikku võnkumist toimub ühes sekundis.
Harmoonilised vibratsioonid.
Eeldame, et võnkuva keha asukoha määrab üks koordinaat. Tasakaaluasend vastab väärtusele. Mehaanika põhiülesanne on sel juhul leida funktsioon, mis annab igal hetkel keha koordinaadi.
Võnkumiste matemaatiliseks kirjeldamiseks on loomulik kasutada perioodilisi funktsioone. Selliseid funktsioone on palju, kuid kaks neist - siinus ja koosinus - on kõige olulisemad. Neil on palju häid omadusi ja nad on tihedalt seotud paljude füüsikaliste nähtustega.
Kuna siinus- ja koosinusfunktsioonid saadakse üksteisest argumendi võrra nihutades, saate piirduda ainult ühega neist. Määratuse jaoks kasutame koosinust.
Harmoonilised vibratsioonid- need on võnkumised, mille koordinaat sõltub harmoonilise seaduse järgi ajast:
(1)
Uurime välja selles valemis sisalduvate koguste tähendused.
Positiivne väärtus on koordinaadi suurim väärtus absoluutväärtuses (kuna koosinuse mooduli maksimaalne väärtus on võrdne ühega), st suurim kõrvalekalle tasakaaluasendist. Seetõttu - võnkumiste amplituud.
Koosinusargumenti nimetatakse faasis kõhklust. Väärtust, mis võrdub faasi väärtusega at, nimetatakse algfaasiks. Algfaas vastab keha algkoordinaadile:.
Kogust nimetatakse tsükliline sagedus... Leiame selle seose võnkeperioodi ja sagedusega. Üks täielik võnkumine vastab radiaanidega võrdsele faasikasvule: kust
(2)
(3)
Tsüklilist sagedust mõõdetakse rad / s (radiaani sekundis).
Kooskõlas avaldistega (2) ja (3) saame harmoonilise seaduse (1) kirjutamiseks veel kaks vormi:
Funktsiooni (1) graafik, mis väljendab harmooniliste võnkumiste koordinaadi sõltuvust ajast, on näidatud joonisel fig. üks .
Vormi (1) harmooniline seadus on kõige üldisema iseloomuga. See reageerib näiteks olukordadele, kus pendliga tehti samaaegselt kaks algtoimingut: nad kaldusid pendli võrra kõrvale ja andsid sellele teatud algkiiruse. On kaks olulist erijuhtumit, kui ühte neist toimingutest ei tehtud.
Laske pendlil kõrvale kalduda, kuid algkiirust ei teatatud (vabastati ilma algkiiruseta). On selge, et antud juhul seega võib panna. Saame koosinusseaduse:
Sel juhul on harmooniliste võnkumiste graafik näidatud joonisel fig. 2.
 |
| Riis. 2. Koosinusseadus |
Oletame nüüd, et pendel ei olnud kõrvale kaldunud, vaid algkiiruse andis talle tasakaaluasendist löök. Sel juhul nii et saate panna. Saame siinuse seaduse:
Võnkumise graafik on näidatud joonisel fig. 3.
 |
| Riis. 3. Siinusseadus |
Harmooniliste vibratsioonide võrrand.
Tuleme tagasi üldise harmoonilise seaduse (1) juurde. Me eristame seda võrdsust:
. (4)
Nüüd eristame saadud võrdsust (4):
. (5)
Võrdleme koordinaadi avaldist (1) ja kiirenduse projektsiooni avaldist (5). Näeme, et kiirenduse projektsioon erineb koordinaadist ainult teguri võrra:
. (6)
Seda suhet nimetatakse harmoonilise vibratsiooni võrrand... Selle saab ümber kirjutada järgmiselt:
. (7)
Matemaatilisest vaatepunktist on võrrand (7). diferentsiaalvõrrand... Funktsioonid (mitte arvud, nagu tavalises algebras) on diferentsiaalvõrrandite lahendused.
Nii et saate tõestada, et:
Võrrandi (7) lahend on mis tahes funktsioon kujul (1) suvalise;
Ükski teine funktsioon ei ole selle võrrandi lahendus.
Teisisõnu, seosed (6), (7) kirjeldavad harmoonilisi võnkumisi tsüklilise sagedusega ja ainult neid. Algtingimustest määratakse kaks konstanti - vastavalt koordinaadi ja kiiruse algväärtustele.
Vedrupendel.
Vedrupendel on vedruga kinnitatud raskus, mis on võimeline vibreerima horisontaalselt või vertikaalselt.
Leiame vedrupendli väikeste horisontaalvõnkumiste perioodi (joonis 4). Võnkumised on väikesed, kui vedru deformatsioon on selle suurusest palju väiksem. Väikeste deformatsioonide korral saame kasutada Hooke'i seadust. See toob kaasa asjaolu, et vibratsioonid on harmoonilised.
Jätame hõõrdumise tähelepanuta. Koormusel on mass, vedru jäikus on võrdne.
Koordinaat vastab tasakaaluasendile, milles vedru ei deformeeru. Järelikult on vedru deformatsiooni suurus võrdne koormuse koordinaadi mooduliga.
 |
| Riis. 4. Vedrupendel |
Horisontaalses suunas mõjub koormusele ainult vedrujõud. Newtoni teine seadus teljele projektsioonis lasti kohta on järgmine:
. (8)
Kui (koormus nihutatakse paremale, nagu joonisel), siis on elastsusjõud suunatud vastupidises suunas ja. Vastupidi, kui, siis. Märgid ja on alati vastupidised, seega saab Hooke'i seaduse kirjutada järgmiselt:
Seejärel võtab seos (8) järgmise kuju:
Oleme saanud kuju (6) harmooniliste vibratsioonide võrrandi, milles
Vedrupendli tsükliline võnkesagedus on seega võrdne:
. (9)
Siit ja suhtarvust leiame vedrupendli horisontaalvõnkumiste perioodi:
. (10)
Kui riputate raskuse vedrule, saate vedruga pendli, mis võngub vertikaalsuunas. Saab näidata, et sel juhul kehtib võnkeperioodi kohta valem (10).
Matemaatiline pendel.
Matemaatiline pendel on väike keha, mis on riputatud kaaluta mitteveniva niidi küljes (joon. 5). Matemaatiline pendel võib gravitatsiooniväljas vertikaaltasandil võnkuda.
 |
| Riis. 5. Matemaatiline pendel |
Leiame matemaatilise pendli väikeste võnkumiste perioodi. Niidi pikkus on. Jätame tähelepanuta õhutakistuse.
Kirjutame pendli jaoks Newtoni teise seaduse:
ja projitseerida see teljele:
Kui pendel asub joonisel näidatud asendis (st), siis:
Kui pendel on teisel pool tasakaaluasendit (st), siis:
Seega on meil pendli mis tahes asendi jaoks:
. (11)
Kui pendel on tasakaaluasendis puhkeasendis, on võrdsus täidetud. Väikeste võnkumiste korral, kui pendli kõrvalekalded tasakaaluasendist on väikesed (võrreldes keerme pikkusega), on ligikaudne võrdsus täidetud. Kasutame seda valemis (11):
See on vormi (6) harmooniliste vibratsioonide võrrand, milles
Järelikult on matemaatilise pendli võnkumiste tsükliline sagedus võrdne:
. (12)
Siit tuleneb matemaatilise pendli võnkeperiood:
. (13)
Pange tähele, et valem (13) ei sisalda koorma massi. Erinevalt vedrupendlist ei sõltu matemaatilise pendli võnkeperiood selle massist.
Vabad ja sunnitud vibratsioonid.
Nad ütlevad, et süsteem teeb vabad vibratsioonid kui see kord tasakaaluasendist välja tuua ja siis omaette jätta. Ei mingit perioodilist välist
Sel juhul süsteem ei koge mingeid mõjutusi ning süsteemil puuduvad sisemised energiaallikad, mis võnkumisi toetaksid.
Eespool käsitletud vedru ja matemaatiliste pendlite võnkumised on vabavõnkumiste näited.
Vabade vibratsioonide esinemise sagedust nimetatakse loomulik sagedus võnkesüsteem. Niisiis, valemid (9) ja (12) annavad vedru ja matemaatiliste pendlite võnkumiste loomulikud (tsüklilised) sagedused.
Idealiseeritud olukorras hõõrdumise puudumisel on vabad vibratsioonid mittesummutavad, st neil on konstantne amplituudi ja kestus lõputult. Reaalsetes võnkesüsteemides on hõõrdumine alati olemas, mistõttu vabavõnkumised järk-järgult summutuvad (joonis 6).
Sunnitud vibratsioonid- need on vibratsioonid, mida süsteem tekitab ajas perioodiliselt muutuva välisjõu mõjul (nn liikumapanev jõud).
Oletame, et süsteemi võnkumiste omasagedus on võrdne ja liikumapanev jõud sõltub harmoonilise seaduse järgi ajast:
Mõnda aega kehtestatakse sundvõnkumised: süsteem teeb keeruka liikumise, mis on sund- ja vabavõnkumiste pealesurumine. Vabavõnkumised vaibuvad järk-järgult ning püsiseisundis sooritab süsteem sundvõnkumisi, mis osutuvad samuti harmoonilisteks. Püsiseisundi sundvõnkumiste sagedus langeb kokku sagedusega
sundiv jõud (välisjõud näib oma sagedust süsteemile peale suruvat).
Püsiseisundi sundvõnkumiste amplituud sõltub liikumapaneva jõu sagedusest. Selle sõltuvuse graafik on näidatud joonisel fig. 7.
 |
| Riis. 7. Resonants |
Näeme, et sageduse lähedal tekib resonants – sundvõnkumiste amplituudi suurenemise nähtus. Resonantssagedus on ligikaudu võrdne süsteemi loomuliku võnkesagedusega: ja see võrdsus on täidetud, mida täpsemalt, seda väiksem on hõõrdumine süsteemis. Hõõrdumise puudumisel langeb resonantssagedus kokku loomuliku vibratsiooni sagedusega ja vibratsiooni amplituud suureneb lõpmatuseni kell.
Meid ümbritsev füüsiline maailm on täis liikumist. Praktiliselt võimatu on leida ühtki füüsilist keha, mida võiks pidada puhkeolekuks. Lisaks ühtlaselt translatiivsele sirgjoonelisele keerulisel trajektooril, kiirendusega liikumisele ja muule, saame oma silmaga jälgida või kogeda materiaalsete objektide perioodiliselt korduvate liikumiste mõju.
Inimene on juba ammu märganud iseloomulikke omadusi ja jooni ning õppinud isegi mehaanilisi vibratsioone oma eesmärkidel kasutama. Kõiki ajas perioodiliselt korduvaid protsesse võib nimetada fluktuatsioonideks. Mehaanilised vibratsioonid on vaid osa sellest mitmekülgsest nähtuste maailmast, mis toimuvad praktiliselt samade seaduste järgi. Mehaaniliste korduvate liigutuste visuaalset näidet kasutades saate koostada põhireeglid ja määrata seadused, mille järgi elektromagnetilised, elektromehaanilised ja muud võnkeprotsessid toimuvad.
Mehaaniliste vibratsioonide esinemise olemus seisneb potentsiaalse energia perioodilises muutumises kineetiliseks energiaks. Näidet selle kohta, kuidas energia muundub mehaaniliste vibratsioonide ajal, saab kirjeldada vedru küljes riputatud kuuliga. Puhkeseisundis tasakaalustavad raskusjõudu vedrud. Kuid niipea, kui süsteem on tasakaalust välja surutud, provotseerides sellega tasakaalupunkti poolelt liikumist, hakkab see muutuma kineetiliseks. Ja see omakorda hakkab hetkest, kui pall läbib nullpositsiooni, muutuma potentsiaalseks. See protsess võtab aega seni, kuni tingimused süsteemi eksisteerimiseks lähenevad täiuslikele.
Siinuse või koosinuse seaduse järgi toimuvaid võnkumisi peetakse matemaatiliselt ideaalseteks. Selliseid protsesse nimetatakse tavaliselt harmoonilisteks vibratsioonideks. Mehaaniliste harmooniliste vibratsioonide ideaalne näide on pendli liikumine, kui hõõrdejõud ei mõjuta. Kuid see on täiesti veatu juhtum, mille saavutamine on tehniliselt väga problemaatiline.
Mehaanilised vibratsioonid, hoolimata nende kestusest, peatuvad varem või hiljem ja süsteem võtab suhtelise tasakaalu positsiooni. See juhtub energia raiskamise tõttu õhutakistuse, hõõrdumise ja muude tegurite ületamiseks, mis paratamatult viivad arvutuste korrigeerimiseni üleminekul ideaalsetest tingimustest reaalsetele tingimustele, milles vaadeldav süsteem eksisteerib.
Paratamatult lähenedes sügavale uurimisele ja analüüsile, jõuame vajaduseni kirjeldada mehaanilisi vibratsioone matemaatiliselt. Selle protsessi valemid sisaldavad selliseid suurusi nagu amplituud (A), (w), algfaas (a). Ja nihke (x) sõltuvuse ajast (t) klassikalisel kujul on funktsioon
Mainimist väärib ka mehaanilisi vibratsioone iseloomustav väärtus, millel on nimi - periood (T), mis on matemaatiliselt defineeritud kui
Mehaanilised vibratsioonid pakuvad lisaks mittemehaanilise iseloomuga vibratsiooniprotsesside kirjelduse selgusele meile huvi mõne omaduse vastu, millest õige kasutamise korral võib kasu olla ja mille tähelepanuta jätmine toob kaasa olulisi probleeme.
Erilist tähelepanu tuleks pöörata amplituudi järsu hüppe nähtusele, kui sundiv jõud mõjutab keha loomulike vibratsioonide sagedust sageduse lähenedes. Seda nimetatakse resonantsiks. Elektroonikas ja mehaanilistes süsteemides laialdaselt kasutatav resonantsi fenomen on peamiselt hävitav, sellega tuleb arvestada väga erinevate mehaaniliste struktuuride ja süsteemide loomisel.
Mehaaniliste vibratsioonide järgmine ilming on vibratsioon. Selle välimus võib põhjustada mitte ainult ebamugavust, vaid põhjustada ka resonantsi. Kuid lisaks negatiivsele mõjule võib madala avaldumisintensiivsusega lokaalne vibratsioon avaldada kasulikku mõju kogu inimkehale, parandades kesknärvisüsteemi funktsionaalset seisundit ja isegi kiirendada jne.
Mehaaniliste vibratsioonide avaldumise variantide hulgas võib eristada heli fenomeni, ultraheli. Nende mehaaniliste lainete kasulikke omadusi ja muid mehaanilise vibratsiooni ilminguid kasutatakse laialdaselt erinevates inimelu valdkondades.
1. Võnkumised. Perioodilised kõikumised. Harmoonilised vibratsioonid.
2. Vaba vibratsioon. Pidevad ja summutatud võnkumised.
3. Sunnitud vibratsioon. Resonants.
4. Võnkumisprotsesside võrdlus. Pidevate harmooniliste vibratsioonide energia.
5. Isevõnkumised.
6. Inimkeha võnkumised ja nende registreerimine.
7. Põhimõisted ja valemid.
8. Ülesanded.
1.1. Kõikumised. Perioodilised kõikumised.
Harmoonilised vibratsioonid
Kõikumised nimetatakse protsessideks, mis erinevad erineva korratavusastme poolest.
Korduv igas elusorganismis toimuvad pidevalt protsessid, näiteks: südame kokkutõmbed, kopsufunktsioon; me väriseme, kui meil on külm; kuuleme ja räägime kuulmekilede ja häälepaelte vibratsiooni tõttu; kõndides teevad meie jalad võnkuvaid liigutusi. Aatomid, millest me oleme tehtud, vibreerivad. Maailm, milles me elame, on üllatavalt altid kõhklustele.
Korduva protsessi füüsikalise iseloomu järgi eristatakse võnkumisi: mehaanilisi, elektrilisi jne. See loeng käsitleb mehaanilised vibratsioonid.
Perioodilised kõikumised
Perioodiline nimetatakse selliseid kõikumisi, kus teatud aja möödudes korduvad kõik liikumise tunnused.
Perioodiliste võnkumiste jaoks kasutatakse järgmisi omadusi:
võnkeperiood T, võrdne ajaga, mille jooksul toimub üks täielik võnkumine;
vibratsiooni sagedusν, võrdne ühe sekundi jooksul tehtud võnkumiste arvuga (ν = 1 / T);
vibratsiooni amplituud A, võrdne maksimaalse nihkega tasakaaluasendist.
Harmoonilised vibratsioonid
Perioodiliste võnkumiste hulgas on eriline koht harmooniline kõikumised. Nende tähtsus tuleneb järgmistest põhjustest. Esiteks on võnkumised looduses ja tehnikas sageli harmoonilisele väga lähedase iseloomuga ja teiseks võib erineva kujuga perioodilisi protsesse (erineva sõltuvusega ajast) kujutada mitme harmoonilise võnke superpositsioonina.
Harmoonilised vibratsioonid- need on kõikumised, mille puhul vaadeldav väärtus muutub aja jooksul vastavalt siinus- või koosinusseadusele:
Matemaatikas nimetatakse seda tüüpi funktsioone harmooniline, seetõttu nimetatakse selliste funktsioonidega kirjeldatud võnkumisi ka harmoonilisteks.
Võnkuvat liikumist sooritava keha asendit iseloomustab nihe tasakaaluasendi suhtes. Sel juhul on valemis (1.1) sisalduvatel kogustel järgmine tähendus:
X- eelarvamus kehad ajahetkel t;
A - amplituud kõikumised, mis on võrdsed maksimaalse nihkega;
ω - ringsagedus vibratsioonid (2-s sooritatud vibratsioonide arv π sekundit), mis on seotud vibratsiooni sagedusega suhtega
φ = (ωt +φ 0) - faasis kõikumised (ajahetkel t); φ 0 - algfaas võnkumised (at = 0 juures).
 Riis. 1.1. Ajanihke graafikud x (0) = A ja x (0) = 0 jaoks
Riis. 1.1. Ajanihke graafikud x (0) = A ja x (0) = 0 jaoks
 1.2. Vaba vibratsioon. Pidevad ja summutatud võnkumised
1.2. Vaba vibratsioon. Pidevad ja summutatud võnkumised
Tasuta või oma nimetatakse selliseid võnkumisi, mis tekivad süsteemis, jäetuna iseendale, pärast seda, kui see on tasakaaluasendist eemaldatud.
Näiteks võib tuua niidi külge riputatud kuuli vibratsiooni. Vibratsiooni tekitamiseks peate kuuli kas lükkama või küljele tõstes selle vabastama. Tõukamisel teavitatakse palli kineetiline energiat ja kõrvalekallete korral - potentsiaal.
Vaba vibratsiooni teostatakse tänu esialgsele energiavarustusele.
Vaba summutamata vibratsioon
Vaba vibratsioon saab olla pidev ainult hõõrdejõu puudumisel. Vastasel juhul kulub esialgne energiavaru selle ületamiseks ja kõikumiste ulatus väheneb.
Vaatleme näiteks kaaluta vedru küljes rippuva keha vibratsioone, mis tekivad pärast keha allasuunamist ja seejärel vabastamist (joonis 1.2).
 Riis. 1.2. Keha vibratsioon vedrul
Riis. 1.2. Keha vibratsioon vedrul
Venitatud vedru küljelt toimib keha elastsusjõud F võrdeline nihke suurusega X:
Konstantset tegurit k nimetatakse kevadmäär ja sõltub selle suurusest ja materjalist. Märk "-" näitab, et elastsusjõud on alati suunatud nihkesuunale vastupidises suunas, st. tasakaaluasendisse.
Hõõrdumise puudumisel on elastsusjõud (1,4) ainus jõud, mis kehale mõjub. Vastavalt Newtoni teisele seadusele (ma = F):
 Pärast kõigi liikmete ülekandmist vasakule ja kehamassiga (m) jagamist saame hõõrdumise puudumisel vabade vibratsioonide diferentsiaalvõrrandi:
Pärast kõigi liikmete ülekandmist vasakule ja kehamassiga (m) jagamist saame hõõrdumise puudumisel vabade vibratsioonide diferentsiaalvõrrandi:
 Väärtus ω 0 (1,6) osutus võrdseks tsüklilise sagedusega. Seda sagedust nimetatakse oma.
Väärtus ω 0 (1,6) osutus võrdseks tsüklilise sagedusega. Seda sagedust nimetatakse oma.
Seega on vabad vibratsioonid hõõrdumise puudumisel harmoonilised, kui tasakaaluasendist kõrvalekaldumisel elastsusjõud(1.4).
Enda ringkiri sagedus on vabade harmooniliste võnkumiste põhiomadus. See väärtus sõltub ainult võnkesüsteemi omadustest (vaataval juhul kehamassist ja vedru jäikusest). Järgnevalt kasutatakse tähistamiseks alati sümbolit ω 0 loomulik ringsagedus(st sagedus, millega võnkumised toimuksid hõõrdejõu puudumisel).
Vabade vibratsioonide amplituud määrab võnkesüsteemi omadused (m, k) ja sellele algsel ajahetkel antud energia.
Hõõrdumise puudumisel tekivad harmoonilistele lähedased vabavõnked ka teistes süsteemides: matemaatilistes ja füüsikalistes pendlites (nende küsimuste teooriat ei käsitleta) (joon. 1.3).
Matemaatiline pendel- väike keha (materiaalne punkt), mis on riputatud kaaluta keermele (joonis 1.3 a). Kui niit lükatakse tasakaaluasendist väikese (kuni 5 °) nurga α võrra kõrvale ja vabastatakse, võngub keha valemiga määratud perioodiga.
 kus L on keerme pikkus, g on raskuskiirendus.
kus L on keerme pikkus, g on raskuskiirendus.
 Riis. 1.3. Matemaatiline pendel (a), füüsiline pendel (b)
Riis. 1.3. Matemaatiline pendel (a), füüsiline pendel (b)
Füüsiline pendel- jäik keha, mis vibreerib gravitatsiooni mõjul ümber fikseeritud horisontaaltelje. Joonis 1.3 b skemaatiliselt kujutab füüsilist pendlit suvalise kujuga keha kujul, mis on tasakaaluasendist kõrvale kaldunud nurga α võrra. Füüsikalise pendli võnkeperioodi kirjeldatakse valemiga
 kus J on keha inertsimoment telje suhtes, m on mass, h on raskuskeskme (punkt C) ja vedrustuse telje (punkt O) vaheline kaugus.
kus J on keha inertsimoment telje suhtes, m on mass, h on raskuskeskme (punkt C) ja vedrustuse telje (punkt O) vaheline kaugus.
Inertsmoment on suurus, mis sõltub keha massist, selle suurusest ja asendist pöörlemistelje suhtes. Inertsmoment arvutatakse spetsiaalsete valemite abil.
Vaba summutatud võnkumised
Reaalsetes süsteemides mõjuvad hõõrdejõud muudavad oluliselt liikumise olemust: võnkesüsteemi energia väheneb pidevalt ning võnkumised kas hääbuma või ei teki üldse.
Vastupanujõud on suunatud keha liikumisele vastupidises suunas ja mitte väga suurtel kiirustel on võrdeline kiiruse suurusega:
 Selliste kõikumiste graafik on näidatud joonisel fig. 1.4.
Selliste kõikumiste graafik on näidatud joonisel fig. 1.4.
Sumbumisastme tunnusena nimetatakse dimensioonita suurust logaritmilise summutuse vähenemineλ.
 Riis. 1.4. Summutatud võnkumiste nihe versus aeg
Riis. 1.4. Summutatud võnkumiste nihe versus aeg
Logaritmilise summutuse vähenemine on võrdne eelmise võnke amplituudi ja järgneva võnke amplituudi suhte naturaallogaritmiga.
kus i on vibratsiooni järjekorraarv.
On lihtne näha, et logaritmilise summutuse vähenemine leitakse valemiga
Tugev sumbumine. Kell
kui tingimus β ≥ ω 0 on täidetud, naaseb süsteem vibreerimata tasakaaluasendisse. Seda liikumist nimetatakse perioodiline. Joonisel 1.5 on näidatud kaks võimalikku viisi tasakaaluasendisse naasmiseks perioodilise liikumise ajal.
 Riis. 1.5. Perioodiline liikumine
Riis. 1.5. Perioodiline liikumine
1.3. Sundvibratsioonid, resonants
Hõõrdejõudude juuresolekul tekkivad vabad vibratsioonid summutatakse. Perioodilisi välismõjusid kasutades saab tekitada pidevaid võnkumisi.
Sunnitud nimetatakse selliseid võnkumisi, mille käigus võnkuv süsteem puutub kokku välise perioodilise jõuga (seda nimetatakse edasiviivaks jõuks).
Laske liikumapanev jõud muutuda harmoonilise seaduse järgi
 Sunnitud võnkumise graafik on näidatud joonisel fig. 1.6.
Sunnitud võnkumise graafik on näidatud joonisel fig. 1.6.
 Riis. 1.6. Sundvõnkumiste nihke ja aja graafik
Riis. 1.6. Sundvõnkumiste nihke ja aja graafik
On näha, et sundvõnkumiste amplituud jõuab püsiseisundi väärtuseni järk-järgult. Püsiseisundi sundvibratsioonid on harmoonilised ja nende sagedus on võrdne liikumapaneva jõu sagedusega:
Püsivate sundvõnkumiste amplituud (A) leitakse valemiga:
 Resonants on sundvibratsiooni maksimaalse amplituudi saavutamine liikuva jõu sageduse teatud väärtusel.
Resonants on sundvibratsiooni maksimaalse amplituudi saavutamine liikuva jõu sageduse teatud väärtusel.
Kui tingimus (1.18) ei ole täidetud, siis resonantsi ei teki. Sel juhul väheneb liikuva jõu sageduse suurenemisega sundvõnkumiste amplituud monotoonselt, kaldudes nullini.
Sundvõnkumiste amplituudi A graafiline sõltuvus liikuva jõu ringsagedusest summutusteguri erinevatel väärtustel (β 1> β 2> β 3) on näidatud joonisel fig. 1.7. Seda graafikute komplekti nimetatakse resonantskõverateks.
Mõnel juhul on vibratsiooni amplituudi tugev tõus resonantsil süsteemi tugevusele ohtlik. On juhtumeid, kui resonants on viinud struktuuride hävimiseni.
 Riis. 1.7. Resonantskõverad
Riis. 1.7. Resonantskõverad
1.4. Võnkumisprotsesside võrdlus. Pidevate harmooniliste vibratsioonide energia
Tabelis 1.1 on toodud vaadeldavate võnkeprotsesside omadused.
Tabel 1.1. Vaba- ja sundvibratsiooni tunnused
 Pidevate harmooniliste vibratsioonide energia
Pidevate harmooniliste vibratsioonide energia
Harmoonilise vibratsiooni teostaval kehal on kahte tüüpi energiat: liikumise kineetiline energia E k = mv 2/2 ja elastsusjõu toimega seotud potentsiaalne energia E p. Teatavasti määratakse elastsusjõu (1.4) toimel keha potentsiaalne energia valemiga E n = kx 2/2. Püsiva vibratsiooni jaoks X= A cos (ωt) ja keha kiirus määratakse valemiga v= - А ωsin (ωt). Seega saadakse pidevat võnkumist sooritava keha energiate avaldised:
 Süsteemi koguenergia, milles tekivad summutamata harmoonilised võnkumised, koosneb nendest energiatest ja jääb muutumatuks:
Süsteemi koguenergia, milles tekivad summutamata harmoonilised võnkumised, koosneb nendest energiatest ja jääb muutumatuks:
Siin m on keha mass, ω ja A on võnkumiste nurksagedus ja amplituud, k on elastsustegur.
1.5. Isevõnkumised
On selliseid süsteeme, mis ise reguleerivad kaotsiläinud energia perioodilist täiendamist ja võivad seetõttu pikka aega kõikuda.
Isevõnkumised- summutamata võnkumised, mida toetab väline energiaallikas, mille voolu reguleerib võnkesüsteem ise.
Süsteeme, milles sellised võnkumised esinevad, nimetatakse isevõnkuv. Isevõnkumiste amplituud ja sagedus sõltuvad isevõnkuva süsteemi enda omadustest. Isevõnkuvat süsteemi saab kujutada järgmise diagrammiga:
 Sel juhul toimib võnkesüsteem ise energiaregulaatori tagasisidekanalina, teavitades seda süsteemi olekust.
Sel juhul toimib võnkesüsteem ise energiaregulaatori tagasisidekanalina, teavitades seda süsteemi olekust.
Tagasiside nimetatakse mis tahes protsessi tulemuste mõju selle kulgemisele.
Kui selline mõju toob kaasa protsessi intensiivsuse suurenemise, siis kutsutakse tagasisidet positiivne. Kui mõju viib protsessi intensiivsuse vähenemiseni, siis kutsutakse tagasisidet negatiivne.
Isevõnkuvas süsteemis võib esineda nii positiivset kui negatiivset tagasisidet.
Isevõnkuva süsteemi näiteks on kell, mille puhul pendel saab lööke ülestõstetud raskuse või väänatud vedru energia tõttu ja need löögid tekivad neil hetkedel, mil pendel läbib keskasendi.
Bioloogiliste isevõnkuvate süsteemide näiteks on sellised elundid nagu süda ja kopsud.
1.6. Inimkeha vibratsioonid ja nende registreerimine
Inimkeha või selle üksikute osade tekitatud vibratsioonide analüüsi kasutatakse laialdaselt meditsiinipraktikas.
Inimkeha võnkuvad liigutused kõndimisel
Kõndimine on keeruline perioodiline liikumisprotsess, mis tuleneb kehatüve ja jäsemete skeletilihaste koordineeritud tegevusest. Kõndimisprotsessi analüüs pakub palju diagnostilisi tunnuseid.
Kõndimise iseloomulik tunnus on tugiasendi sagedus ühe jalaga (ühe toe periood) või kahe jalaga (topelttoe periood). Tavaliselt on nende perioodide suhe 4:1. Kõndimisel toimub massikeskme (CM) perioodiline nihkumine piki vertikaaltelge (tavaliselt 5 cm) ja kõrvalekalle küljele (tavaliselt 2,5 cm). Sel juhul liigub CM piki kõverat, mida saab ligikaudu esitada harmoonilise funktsiooniga (joonis 1.8).
 Riis. 1.8. Inimkeha CM vertikaalne nihe kõndimise ajal
Riis. 1.8. Inimkeha CM vertikaalne nihe kõndimise ajal
Keerulised võnkuvad liigutused, säilitades samal ajal püsti kehaasendi.
Püsti seisval inimesel on toetustasandil jalgade üldise massikeskme (GCM) ja survekeskme (CP) komplekssed võnked. Nende kõikumiste analüüs põhineb statokinemeetria– meetod, mille abil hinnata inimese võimet hoida püstiasendit. Hoides GCM projektsiooni toetusala piiri koordinaatides. Seda meetodit rakendatakse stabilomeetrilise analüsaatori abil, mille põhiosa moodustab stabiloplatvorm, millel uuritav on vertikaalses asendis. Katsealuse CP poolt püstises asendis tekitatud võnked edastatakse stabiloplatvormile ja registreeritakse spetsiaalsete tensoandurite abil. Koormusanduritest saadavad signaalid edastatakse salvestusseadmesse. Sel juhul on see kirjas statokinesigramm - katsealuse KP liikumise trajektoor horisontaaltasandil kahemõõtmelises koordinaatsüsteemis. Harmooniline spekter statokinesigrammid saab hinnata vertikaalsuse iseärasuste üle normis ja sellest kõrvalekaldumise korral. See meetod võimaldab analüüsida inimese statokineetilise stabiilsuse (SKU) näitajaid.
Südame mehaanilised vibratsioonid
Südame uurimiseks on erinevaid meetodeid, mis põhinevad mehaanilistel perioodilistel protsessidel.
Ballistokardiograafia(BCG) - meetod südametegevuse mehaaniliste ilmingute uurimiseks, mis põhineb keha pulsi mikroliigutuste registreerimisel, mis on põhjustatud vere tõuke väljumisest südame vatsakestest suurtesse anumatesse. Sel juhul ilmneb nähtus tagasilöök. Inimkeha asetatakse spetsiaalsele teisaldatavale platvormile, mis asub massiivsel statsionaarsel laual. Platvorm satub tagasilöögi tagajärjel keerukasse võnkuvasse liikumisse. Platvormi nihke sõltuvust kehast ajast nimetatakse ballistokardiogrammiks (joonis 1.9), mille analüüs võimaldab hinnata vere liikumist ja südametegevuse seisundit.
Apekskardiograafia(AKG) on meetod rindkere madalsageduslike võnkumiste graafiliseks registreerimiseks südame tööst põhjustatud apikaalse impulsi piirkonnas. Apekskardiogrammi registreerimine toimub reeglina mitmekanalilisel elektrokardiogrammil.
 Riis. 1.9. Ballistokardiogrammi salvestamine
Riis. 1.9. Ballistokardiogrammi salvestamine
ograaf, kasutades piesokristallilist andurit, mis muundab mehaanilised vibratsioonid elektrilisteks. Enne rindkere eesmisele seinale salvestamist määratakse palpatsiooniga maksimaalse pulsatsiooni punkt (apikaalne impulss), milles andur on fikseeritud. Anduri signaalide järgi koostatakse automaatselt apekskardiogramm. Tehakse ACG amplituudianalüüs - kõvera amplituude võrreldakse südame töö eri faasides maksimaalse kõrvalekaldega nulljoonest - EO segmendist, mis on võetud 100%. Joonis 1.10 näitab apekskardiogrammi.
 Riis. 1.10. Apekskardiogrammi registreerimine
Riis. 1.10. Apekskardiogrammi registreerimine
Kinetokardiograafia(KKG) - meetod südametegevusest põhjustatud rindkere seina madalsageduslike vibratsioonide registreerimiseks. Kinetokardiogramm erineb apekskardiogrammist: esimene salvestab rindkere seina absoluutsete liikumiste salvestuse ruumis, teine roietevahelise ruumi vibratsiooni ribide suhtes. Selle meetodi puhul määratakse rindkere võnkumiste nihe (KKG x), liikumiskiirus (KKG v) ja kiirendus (KKG a). Joonis 1.11 näitab erinevate kinetokardiogrammide võrdlust.
 Riis. 1.11. Kinetokardiogrammide salvestamine nihke (x), kiiruse (v), kiirenduse (a) kohta
Riis. 1.11. Kinetokardiogrammide salvestamine nihke (x), kiiruse (v), kiirenduse (a) kohta
Dünamokardiograafia(DCG) - meetod rindkere raskuskeskme liikumise hindamiseks. Dünamokardiograaf võimaldab registreerida inimese rindkere küljelt mõjuvaid jõude. Dünamokardiogrammi salvestamiseks asetatakse patsient selili lamavale lauale. Rindkere all on andur, mis koosneb kahest jäigast metallplaadist mõõtmetega 30x30 cm, mille vahel on elastsed elemendid, mille külge on kinnitatud pingeandurid. Perioodiliselt erineva suuruse ja kasutuskoha poolest koosneb sensorile mõjuv koormus kolmest komponendist: 1) konstantne komponent – rindkere mass; 2) muutuv - hingamisliigutuste mehaaniline mõju; 3) muutuv - südame kokkutõmbumisega kaasnevad mehaanilised protsessid.
Dünamokardiogramm registreeritakse, hoides patsiendi hinge kinni kahes suunas: vastuvõtva seadme piki- ja põiktelje suhtes. Erinevate dünamokardiogrammide võrdlus on näidatud joonisel fig. 1.12.
Seismokardiograafia põhineb inimese keha mehaaniliste vibratsioonide registreerimisel, mis on põhjustatud südame tööst. Selle meetodi korral registreeritakse xiphoid protsessi aluse piirkonda paigaldatud andurite abil südame impulss, mis on tingitud südame mehaanilisest aktiivsusest kontraktsiooniperioodil. Sel juhul on protsessid, mis on seotud veresoonte voodi koe mehhanoretseptorite aktiivsusega, mis aktiveeruvad tsirkuleeriva vere mahu vähenemisel. Südame seismiline signaal moodustab rinnaku võnkumiste vormi.
 Riis. 1.12. Normaalsete pikisuunaliste (a) ja põiksuunaliste (b) dünamokardiogrammide registreerimine
Riis. 1.12. Normaalsete pikisuunaliste (a) ja põiksuunaliste (b) dünamokardiogrammide registreerimine
Vibratsioon
Erinevate masinate ja mehhanismide laialdane kasutuselevõtt inimelus suurendab tööviljakust. Paljude mehhanismide töö on aga seotud inimesele edasi kanduvate ja talle kahjulikku mõju avaldavate vibratsioonide tekkimisega.
Vibratsioon- keha sundvõnked, mille puhul vibreerib kas terve keha tervikuna või selle eraldi osad erineva amplituudi ja sagedusega.
Inimene kogeb pidevalt erinevaid vibratsioonimõjusid transpordis, tootmises, igapäevaelus. Vibratsioon, mis on tekkinud ükskõik millises kehaosas (näiteks tungraua käes hoidva töötaja käes), levib elastsete lainetena kogu kehas. Need lained põhjustavad keha kudedes erinevat tüüpi muutuvaid deformatsioone (surumine, venitus, nihke, painutamine). Vibratsioonide mõju inimesele on tingitud paljudest vibratsiooni iseloomustavatest teguritest: sagedus (sagedusspekter, põhisagedus), amplituud, võnkepunkti kiirus ja kiirendus, võnkeprotsesside energia.
Pikaajaline kokkupuude vibratsiooniga põhjustab püsivaid häireid organismi normaalsetes füsioloogilistes funktsioonides. Võib tekkida vibratsioonihaigus. See haigus põhjustab inimkehas mitmeid tõsiseid häireid.
Vibratsiooni mõju kehale sõltub vibratsiooni intensiivsusest, sagedusest, kestusest, nende rakendamise kohast ja suunast keha suhtes, kehaasendist, aga ka inimese seisundist ja tema individuaalsetest omadustest.
Võnkumised sagedusega 3-5 Hz põhjustavad vestibulaarse aparatuuri reaktsioone, vaskulaarseid häireid. Sagedustel 3-15 Hz täheldatakse üksikute elundite (maks, magu, pea) ja kogu keha resonantsvibratsiooniga seotud häireid. Kõikumised sagedusega 11-45 Hz põhjustavad nägemiskahjustusi, iiveldust ja oksendamist. Sagedustel üle 45 Hz aju veresoonte kahjustused, vereringe häired jne. Joonisel 1.13 on kujutatud inimesele ja tema elundite süsteemidele kahjulikku mõju avaldavate võnkesageduste alad.
 Riis. 1.13. Vibratsiooni inimesele kahjuliku mõju sagedusvahemikud
Riis. 1.13. Vibratsiooni inimesele kahjuliku mõju sagedusvahemikud
Samal ajal kasutatakse meditsiinis mitmel juhul vibratsiooni. Näiteks spetsiaalse vibraatori abil valmistab hambaarst amalgaami ette. Kõrgsagedusvibratsiooniseadmete kasutamine võimaldab puurida hambasse keerulise kujuga auku.
Vibratsiooni kasutatakse ka massaažis. Manuaalse massaaži käigus viiakse masseeritavad koed massööri käte abil vibratsiooniliigutusse. Riistvaralise massaaži käigus kasutatakse vibraatoreid, milles vibratsiooniliigutuste kehale edastamiseks kasutatakse erineva kujuga otsikuid. Vibratsiooniaparaadid jagunevad üldvibratsiooni aparaatideks, mis raputavad kogu keha (vibreeriv "tool", "voodi", "platvorm" jne) ja seadmeteks, mis mõjutavad lokaalset vibratsiooni teatud kehaosadele.
Mehhanoteraapia
Füsioteraapia harjutustes (harjutusravi) kasutatakse simulaatoreid, millel tehakse inimkeha erinevate osade võnkuvaid liigutusi. Neid kasutatakse sisse mehhanoteraapia - harjutusravi vorm, mille üheks ülesandeks on doseeritud, rütmiliselt korduvate kehaliste harjutuste läbiviimine, et treenida või taastada liigeste liikuvust pendel-tüüpi aparatuuril. Nende seadmete alus on tasakaalustav (alates fr. tasakaalustaja- kiik, tasakaal) pendel, mis on kahe käega kang, mis teeb võnkuvaid (kiikuvaid) liigutusi ümber fikseeritud telje.
1.7. Põhimõisted ja valemid
 Tabeli jätk
Tabeli jätk
 Tabeli jätk
Tabeli jätk
 Tabeli lõpp
Tabeli lõpp
 1.8. Ülesanded
1.8. Ülesanded
1. Too näiteid inimese vibratsioonisüsteemidest.
2. Täiskasvanu süda lööb 70 korda minutis. Määrake: a) kontraktsioonide sagedus; b) vähendamiste arv 50 aasta jooksul
Vastus: a) 1,17 Hz; b) 1,84 x 10 9.
3. Kui pikk peab olema matemaatiline pendel, et selle võnkeperiood oleks võrdne 1 sekundiga?
 4.
Õhuke sirge homogeenne 1 m pikkune varras riputatakse otsa külge teljel. Määrake: a) milline on selle võnkeperiood (väike)? b) kui pikk on sama võnkeperioodiga matemaatiline pendel?
4.
Õhuke sirge homogeenne 1 m pikkune varras riputatakse otsa külge teljel. Määrake: a) milline on selle võnkeperiood (väike)? b) kui pikk on sama võnkeperioodiga matemaatiline pendel?
 5.
1 kg kaaluv keha vibreerib vastavalt seadusele x = 0,42 cos (7,40t), kus t mõõdetakse sekundites ja x on meetrites. Leidke: a) amplituud; b) sagedus; c) täisenergia; d) kineetilised ja potentsiaalsed energiad x = 0,16 m juures.
5.
1 kg kaaluv keha vibreerib vastavalt seadusele x = 0,42 cos (7,40t), kus t mõõdetakse sekundites ja x on meetrites. Leidke: a) amplituud; b) sagedus; c) täisenergia; d) kineetilised ja potentsiaalsed energiad x = 0,16 m juures.
 6.
Hinnake kiirust, millega inimene sammu pikkusega kõnnib l= 0,65 m. Jala pikkus L = 0,8 m; raskuskese asub jalast H = 0,5 m kaugusel. Jala inertsmomendi määramiseks puusaliigese suhtes kasutage valemit I = 0,2 ml 2.
6.
Hinnake kiirust, millega inimene sammu pikkusega kõnnib l= 0,65 m. Jala pikkus L = 0,8 m; raskuskese asub jalast H = 0,5 m kaugusel. Jala inertsmomendi määramiseks puusaliigese suhtes kasutage valemit I = 0,2 ml 2.
 7.
Kuidas saate määrata kosmosejaama pardal oleva väikese keha massi, kui teie käsutuses on kell, vedru ja raskuste komplekt?
7.
Kuidas saate määrata kosmosejaama pardal oleva väikese keha massi, kui teie käsutuses on kell, vedru ja raskuste komplekt?
 8.
Summutatud võnkumiste amplituud väheneb 10 võnke korral 1/10 esialgsest väärtusest. Võnkeperiood on T = 0,4 s. Määrake logaritmiline dekrement ja summutustegur.
8.
Summutatud võnkumiste amplituud väheneb 10 võnke korral 1/10 esialgsest väärtusest. Võnkeperiood on T = 0,4 s. Määrake logaritmiline dekrement ja summutustegur.
Kõikumised Need on liigutused või protsessid, mis korduvad täpselt või ligikaudu korrapäraste ajavahemike järel.
Mehaanilised vibratsioonid mehaaniliste väärtuste kõikumised (nihe, kiirus, kiirendus, rõhk jne).
Mehaanilised vibratsioonid (olenevalt jõudude olemusest) on järgmised:
tasuta;
sunnitud;
isevõnkumine.
Tasuta nimetatakse vibratsioone, mis tekivad välisjõu ühekordsel toimel (energia esialgne edastamine) ja välismõjude puudumisel võnkesüsteemile.
Tasuta (või oma)- need on võnkumised süsteemis sisejõudude mõjul pärast süsteemi tasakaaluseisundist välja viimist (reaalsetes tingimustes on vabad võnked alati summutatud).
Vaba vibratsiooni tingimused
1. Võnkesüsteemil peab olema stabiilne tasakaaluasend.
2. Süsteemi tasakaaluasendist eemaldamisel peaks tekkima resultantjõud, mis viib süsteemi tagasi algasendisse
3. Hõõrdejõud (takistus) on väga väikesed.
Sunnitud vibratsioonid- ajas muutuvate välisjõudude mõjul tekkivad vibratsioonid.
Isevõnkumised- püsivad võnked süsteemis, mida toetavad sisemised energiaallikad välise muutuva jõu puudumisel.
Isevõnkumiste sagedus ja amplituud on määratud võnkesüsteemi enda omadustega.
Isevõnkumised erinevad vabast võnkumisest amplituudi sõltumatuse ajast ja võnkeprotsessi ergastavast alglöögist.
Isevõnkuv süsteem koosneb: võnkesüsteemist; energiaallikas; tagasisideseadmed, mis reguleerivad energia voolu sisemisest energiaallikast võnkesüsteemi.
Perioodi jooksul allikast saadud energia on võrdne võnkesüsteemi poolt sama aja jooksul kaotatud energiaga.
Mehaanilised vibratsioonid jagunevad:
hääbuv;
summutamata.
Summutatud võnkumised- vibratsioonid, mille energia aja jooksul väheneb.
Võnkuva liikumise omadused:
püsiv:
amplituud (A)
periood (T)
sagedus ()
Võnkekeha suurimat (moodulis) kõrvalekallet tasakaaluasendist nimetatakse võnkumiste amplituud. Tavaliselt tähistatakse amplituudi tähega A.
Ajavahemikku, mille jooksul keha teeb ühe täieliku vibratsiooni, nimetatakse kõikumiste periood.
Tavaliselt tähistatakse võnkeperioodi tähega T ja SI-s mõõdetakse seda sekundites (s).
Vibratsioonide arvu ajaühikus nimetatakse vibratsiooni sagedus.
Sagedus on tähistatud tähega v (“nu”). Sageduse ühikuks võetakse üks vibratsioon sekundis. See üksus on oma nime saanud saksa teadlase Heinrich Hertzi hertsi (Hz) järgi.
võnkeperiood T ja võnkesagedus v on seotud järgmise seosega:
T = 1 / või = 1 / T.
Tsükliline (ringikujuline) sagedus ω- võnkumiste arv 2π sekundis
Harmoonilised vibratsioonid- mehaanilised vibratsioonid, mis tekivad nihkega võrdelise ja sellele vastupidise jõu mõjul. Harmoonilised võnked sooritatakse siinuse või koosinuse seaduse järgi.
Laske materiaalsel punktil teostada harmoonilisi vibratsioone.
Harmoonilise vibratsiooni võrrandil on vorm:

a - kiirendus V - kiirus q - laeng A - amplituud t - aeg





