dźwigi pływające. Dźwigi pływające (dźwigi pływające) Dźwigi pływające za granicą
W 1964 roku firma Lengiprotransmost opracowała projekt dźwigu pływającego PRK-100 o udźwigu 100 T przeznaczone do instalacji oraz operacji załadunku i rozładunku przy budowie mostów i na budowach w pobliżu zbiorników wodnych.
Żuraw jest składany, maksymalna waga pojedynczego elementu nie przekracza 7 T. Żuraw można transportować na plac budowy zarówno koleją, jak i samochodami, ponieważ wszystkie elementy żurawia z łatwością mieszczą się w wymiarach szynowych i drogowych.
Żuraw montowany jest na pontonie złożonym z 24 pontonów typu KS, przygotowanych wcześniej na budowie. W przypadku 10 ton dźwigów montażowych (samochodowych lub pływających) montaż żurawia na gotowej podporze zajmuje od 12 do 15 dni. Demontaż dźwigu odbywa się w ciągu 10 - 12 dni.
Żuraw PRK-100 wyposażony jest w dwa haki: udźwig główny 100 ton oraz udźwig pomocniczy 30 T. Przy obciążeniu na haku do 30 T górną część żurawia można obracać o 90° w obu kierunkach. Zawracanie odbywa się za pomocą wyciągarki zamontowanej na pontonie. Z ładunkiem ważącym więcej niż 30 T dźwig obraca się wraz z taranem. Jednocześnie pod zawiasami wspornika wysięgnika oraz w tylnej części obrotnicy zamontowane są urządzenia blokujące. Manewry żurawiami na wodzie zapewniają cztery wyciągarki papillon wyposażone w układacze linowe, a także cały sprzęt niezbędny do prac papillonowych.
Wszystkie wciągarki żurawia, w tym 3 cargo i 1 wysięgnik, zasilane są z własnej elektrowni AD-75T/400 o mocy 75 kW zainstalowany na siłowniku dźwigu. Sterowanie napędami elektrycznymi skoncentrowane jest w kabinie operatora żurawia.
Żuraw PRK-100 różni się od istniejących uniwersalnych pełnoobrotowych żurawi pływających niską wagą, montażem i małym zanurzeniem. Koszt jego produkcji jest 6 razy niższy niż w przypadku żurawi uniwersalnych, obsługują go 4 osoby zamiast 10.
Prototyp żurawia PRK-100, wyprodukowany przez Zakłady Napraw Mechanicznych Uglich, przeszedł wszystkie testy i jest eksploatowany przez Mostootryad nr 11 w Leningradzie nad rzeką. Neva przez 1,5 roku. Komitet akceptacyjny Ministerstwa Transportu i Budownictwa ZSRR zarekomendował go do masowej produkcji.

| Schemat konstrukcyjny żurawia PRK-100 |
Charakterystyka techniczna żurawia PRK-100
| Najwyższa nośność, ts: | |
| na głównym haku | 100 |
| na haku pomocniczym | 30 |
| Zasięg użyteczny wysięgnika (od strony siłownika), M: | |
| załadowany 100 T: najmniejszy | 3 |
| . załadowany 100 T: Największa | 10 |
| . załadowany 30 T: najmniejszy | 5 |
| . załadowany 30 T: Największa | 22 |
| Wysokość haka od powierzchni wody podczas lotu 10 M, M | 30 |
| Prędkość podnoszenia (na haku głównym/pomocniczym), m/min | 1,7 / 3 |
| Prędkość obrotu żurawia z ładunkiem 30 T na haku obr./min | 0,11 |
| Szybkość ruchu żurawia za pomocą wciągarek papillon, obr./min | 5 |
| Zanurzenie (podczas pracy dźwigu), M | 1,6 |
| Masa zabudowy (bez siłowników), T | 215 |
GANZ- jeden z najstarszych marek dźwigów pływających na świecie, jest reprezentowany przez pełną gamę modeli, które zgodnie z przeznaczeniem dźwigów pływających można sklasyfikować jako:
Dźwigi pływające typu clamshell
Ładowność od 5 do 60 ton. W pełni obrotowy, z wysięgnikiem prostym lub przegubowym ze sztywnym odciągiem. Ciągnione lub samobieżne. Wersja w pełni autonomiczna lub z funkcją zmiany zegarka. Do przeładunku dużych ilości wszelkiego rodzaju ładunków sypkich / masowych. Dzięki połączeniu zwiększonej wyporności, stabilności i odchylenia konstrukcji dźwigu pływającego jako całości z dużą prędkością wszystkich podstawowych operacji uzyskuje się wysoką zdolność przeładunkową: od 300 do 2000 ton/godz. Mogą mieć rzekę i morze, a także lodową klasę wydajności. W dźwigach pływających powyżej 5 ton stosuje się chwytak 4-linowy. Stosowane są jako pogłębiarki denne z możliwością wyposażenia w przenośnik taśmowy do rozładunku urobku. Możliwość pracy w trybie hakowym, co zwiększa ładowność, ale zmniejsza szybkość operacji.
Dźwigi pływające z hakami ładunkowymi
Ładowność od 5 do 200 ton. W pełni obrotowy, z wysięgnikiem prostym lub przegubowym ze sztywnym odciągiem. Ciągnione lub samobieżne. Wersja w pełni autonomiczna lub z funkcją zmiany zegarka. Do przeładunku drobnych i ciężkich ładunków. Dzięki innym podobieństwom w charakterystyce różni się od dźwigów pływających z chwytakiem ładunkowym obecnością zmniejszonych prędkości do wykonywania podstawowych operacji wymaganych do dokładniejszej pracy. Mogą mieć rzekę i morze, a także lodową klasę wykonania.
Montaż i budowa dźwigów pływających
Ładowność od 16 do 300 ton. W pełni obrotowy, z wysięgnikiem prostym lub przegubowym ze sztywnym odciągiem. Ciągnione lub samobieżne. Wersja w pełni autonomiczna lub z funkcją zmiany zegarka. Wykorzystywane są w przemyśle stoczniowym, ciężkim, energetycznym, inżynierii transportu, budowie mostów i budowli hydrotechnicznych, a także pracach przy zagospodarowaniu szelfu morskiego. Wyróżnia się pracą przy niskich prędkościach: 1-12 m/min. Mogą mieć rzekę i morze, a także lodową klasę wydajności.
Montaż i ratownictwo dźwigów pływających
Nośność od 200 do 500 ton i więcej. Z prostym, pochylonym systemem wysięgnika stałego. Ciągnione lub samobieżne. Wersja w pełni autonomiczna lub z funkcją zmiany zegarka. Zgodnie z przeznaczeniem mogą być wyposażone w różnorodne wyposażenie pomocnicze. Znajdują zastosowanie w przemyśle stoczniowym, ciężkim, energetycznym, inżynierii transportu, budowie mostów i budowli hydrotechnicznych, pracach przy zagospodarowaniu szelfu morskiego oraz akcjach ratownictwa podwodnego. Szybki tryb pracy: 0.1-5 metrów/minutę. Mogą mieć rzekę i morze, a także lodową klasę wykonania. Istnieje możliwość wyposażenia wysięgnika w kufer do pracy z ładunkami mniejszymi niż udźwig znamionowy w przypadkach, gdy wymagany jest bardzo duży zasięg wysięgnika.
pływający dźwig– niezwykle wszechstronny i niezawodny sprzęt. Służą do załadunku i rozładunku statków, pogłębiania dna, budowy mostów i innych konstrukcji wodnych.
pływający dźwig w porcie niemal niezastąpiony do prac wielozadaniowych, dzięki czemu stosunkowo wysoki koszt zwraca się w krótkim czasie.
- Dźwig pływający o udźwigu 16 t
- Dźwig pływający o udźwigu 32 ton (Al Furat)
- Dźwig pływający o udźwigu 32 ton (Hafez)
- Dźwig pływający o udźwigu 100 ton (El Mansour)

pływający dźwig- jest to dźwig zainstalowany na stałe na specjalnej jednostce pływającej, zarówno z własnym napędem, jak i bez własnego napędu, przeznaczony do wykonywania operacji podnoszenia i przenoszenia.
2.1.1. Informacje ogólne
W przeciwieństwie do innych typów żurawi, żurawie pływające wyposażone są w pomieszczenia mieszkalne dla załogi (załoga stała), warsztaty remontowe i takielunkowe, stołówki, dodatkowe wyposażenie statku, mechanizmy pokładowe oraz własne elektrownie, dzięki czemu żuraw może działać autonomicznie z dala od wybrzeże. Mechanizmy dźwigów pływających są z reguły napędzane silnikiem wysokoprężnym. Możliwe jest również zasilanie z brzegu. Śmigła lub śmigła łopatkowe są używane jako śmigła. Te ostatnie nie wymagają urządzenia sterującego i mogą poruszać żurawiem do przodu, do tyłu, na boki (opóźnienie) lub rozstawiać w miejscu.
W zależności od dróg wodnych, pływające dźwigi podlegają jurysdykcji Rosyjskiego Morskiego Rejestru Statków lub Rosyjskiego Rejestru Rzecznego.
Zgodnie z wymaganiami Rejestru Morskiego dźwigi pływające muszą być wyposażone we wszystkie urządzenia przewidziane dla statków tj. muszą posiadać odbijacze (drewniane belki wystające wzdłuż zewnętrznej części wolnej burty statku w sposób ciągły lub częściowy, chroniące burtę przed uderzeniem w inne statki i konstrukcje), kabestany (mechanizmy okrętowe w postaci pionowych wrót do podnoszenia i zwalniania kotwic, podnoszenia ciężarów , ciągnięcie cum itp.), pachołki (sparowane pachołki ze wspólną tablicą na pokładzie statku, przeznaczone do mocowania do nich kabli), kotwice i wciągarki kotwiczne, a także sygnalizacja świetlna i dźwiękowa, łączność radiowa, pompy studzienkowe i ratunkowe -oszczędność sprzętu. Podczas eksploatacji dźwig pływający musi mieć zapewniony zapas świeżej wody, żywności, paliwa i smarów zgodnie z normami na czas autonomicznej nawigacji. Główne wymagania dotyczące pływających pontonów dźwigów to wytrzymałość konstrukcyjna, pływalność i stabilność.
W przypadku transportu śródlądowymi drogami wodnymi całkowita wysokość żurawia w stanie złożonym musi być zgodna z GOST 5534 i być przypisana z uwzględnieniem wymiarów rusztowania i możliwości przejazdu pod napowietrznymi liniami energetycznymi.
Ze względu na cel żurawie można sklasyfikować w następujący sposób:
Dźwigi przeładunkowe(ogólnego przeznaczenia), przeznaczone do operacji masowych (ich opis przedstawiono w pracach). Według GOST 5534 udźwig pływających dźwigów przeładunkowych wynosi 5, 16 i 25 ton, maksymalny zasięg 30 ... 36 m, minimalny 9 ... 11 m, wysokość podnoszenia haka nad poziomem wody wynosi 18,5 ... do ładowni statku) - nie mniej niż 11 ... 20 m (w zależności od ładowności), prędkość podnoszenia 1,17 ... 1,0 m / s (70 ... 45 m / min), szybkość zmiany odjazdu 0,75 ... 1,0 m / s (45 ... 60 m / min), prędkość 0,02 ... 0,03 s -1 (1,2 ... 1,75 obr / min) . Są to żurawie, takie jak np. Ganz, produkowane na Węgrzech (ryc. 2.1.), Dźwigi domowe (ryc. 2.2).
Dźwigi specjalnego przeznaczenia(duża ładowność) - do przeładunku ciężkich ładunków, prac budowlanych, instalacyjnych, stoczniowych i ratowniczych.
Dźwigi pływające przeznaczone do prac instalacyjnych znajdują zastosowanie przy budowie konstrukcji hydraulicznych, do prac w stoczniach i stoczniach remontowych.
Dźwig niemieckiej firmy „Demag” o udźwigu 350 ton wykorzystano przy odbudowie mostów leningradzkich, podczas montażu
80-tonowe żurawie portalowe podczas przenoszenia żurawi portalowych z jednego obszaru portu do drugiego itp.
Dźwig roślin WOM im. S. M. Kirow o ładowności 250 ton został wykonany do instalacji platform wiertniczych na Morzu Kaspijskim.
Dźwigi „Czernomorec” o udźwigu 100 ton i „Bogatyr” o udźwigu 300 ton (ryc. 2.3) otrzymały Nagrodę Państwową ZSRR.

Ryż. 2.2. Transfer dźwigów pływających o udźwigu 5 ton ( A) i 16 ton ( B): 1 - chwyć jak najdalej; 2 - bagażnik; 3 - strzała w pozycji złożonej; 4 - podkreślenie; 5 - strzałka działająca; 6 - ponton; 7 - chwyć przy najmniejszym zasięgu; 8 - kabina; 9 - gramofon; 10 - kolumna; 11 - urządzenie równoważące połączone z mechanizmem zmiany odejścia; 12 - przeciwwaga

Ryż. 2.3. Dźwig pływający „Bogatyr” o udźwigu 300 ton (fabryka w Sewastopolu im. S. Ordżonikidze): 1 - ponton; 2 - strzała w pozycji złożonej; 3 - pomocnicze zawieszenie podnoszące; 4 - zawieszenie wyciągu głównego; 5 - strzałka
Żuraw Vityaz (ryc. 2.4) o udźwigu 1600 ton jest używany podczas pracy z dużymi ładunkami, na przykład podczas instalowania konstrukcji mostowych przez rzekę na wspornikach zamontowanych na brzegu. Żuraw ten oprócz głównego wciągnika posiada wciągnik pomocniczy o udźwigu 200 ton. Wyjazd wyciągu głównego 12 m, pomocniczy 28,5 m. Występują dźwigi pływające i o większej nośności.
Dźwigi specjalne, które wykonują przeładunek ciężkich ładunków w portach, prace instalacyjne i budowlane przy budowie statków, remontach statków i budowie elektrowni wodnych, akcjach ratowniczych, posiadają burty w pełni obrotowe. Udźwig - od 60 (dźwig Astrachański) do 500 ton, na przykład: Czernomorec - 100 ton, Sewastopol - 140 ton (ryc. 2.5), Bogatyr - 300 ton, Bogatyr-M - 500 ton . na ryc. 2.6 przedstawia żurawie „Bogatyr” z różnymi modyfikacjami wysięgników i odpowiadającymi im wykresami udźwigu o zmiennym zasięgu.
Specjalistyczne dźwigi do podnoszenia statków i operacji ratowniczych oraz montażu dużych ciężkich konstrukcji są z reguły stałe.

Ryż. 2.5. Żuraw pływający „Sewastopolec” o udźwigu 140 ton (fabryka w Sewastopolu im. S. Ordżonikidze): 1 - ponton; 2 - strzała w pozycji złożonej; 3 - strzałka działająca
|

Ryż. 2.6. Dźwigi pływające: A- "Bogatyr"; B- „Bogatyr-3” z dodatkową strzałką; V- „Bogatyr-6” z przedłużonym wysięgnikiem dodatkowym; Q– dopuszczalna nośność na wysięgniku R; H- wysokość podnoszenia
Przykładami takich dźwigów są: „Volgar” - 1400 ton; „Vityaz” - 1600 ton (ryc. 2.4), podnoszenie ładunku o masie 1600 ton odbywa się za pomocą wciągarki trójpokładowej „Magnus” (Magnus, Niemcy) o udźwigu od 200 do 1600 ton (ryc. 2.7 ), „Balder” (Balder , Holandia) o ładowności od 2000 do 3000 ton (ryc. 2.8).
Pole naftowe. Statki dźwigowe do zaopatrzenia przybrzeżnych pól naftowych i budowy przybrzeżnych obiektów naftowych i gazowych mają zwykle obrotowe burty, znaczny zasięg i wysokość podnoszenia oraz są zdolne do obsługi stacjonarnych platform wiertniczych. Do takich dźwigów należą na przykład „Jakub Kazimow” - o udźwigu 25 ton (ryc. 2.9), „Kerr-ogly” - o udźwigu 250 ton. W związku z rozwojem szelfu kontynentalnego obserwuje się tendencję do zwiększania parametrów żurawi z tej grupy (udźwig do 2000...2500 ton i więcej).

Ryż. 2.7. Dźwig pływający "Magnus" o udźwigu 800 ton (HDW, Niemcy): 1 - ponton; 2 - strzała w pozycji złożonej; 3 – wciągarka pokładowa; 4 – wciągarka uchylna wysięgnika; 5 - klamra; 6 - strzałka; 7 - gęś; 8 - zawieszenie wyciągu głównego; 9 - pomocnicze zawieszenie podnoszące

Ryż. 2.8. Dźwig pływający "Balder" o udźwigu 3000 ton ("Gusto", Holandia - ( A) oraz harmonogram zmian dopuszczalnej nośności Q od wyjazdu R (B)):
1 - ponton; 2 - gramofon; 3 - strzałka; I ... IV - zawieszenia hakowe

Ryż. 2.9. Statek dźwigowy „Jakub Kazimow”: 1 - ponton; 2 - strzała w pozycji złożonej; 3 - wyrównujący wciągnik łańcuchowy; 4 - kabina; 5 - rama części obrotowej
W zależności od zdatności do żeglugi, dźwigi można sklasyfikować w następujący sposób:
1) port (do wykonywania czynności przeładunkowych w portach i przystaniach, akwenach zamkniętych oraz obszarach przybrzeżnych mórz (przybrzeżnych) i rzecznych, w stoczniach stoczniowych i stoczniach remontowych);
2) zdatny do żeglugi (do pracy na pełnym morzu z możliwością długich niezależnych przejść).
Krajowa branża dźwigowa charakteryzuje się chęcią tworzenia żurawi uniwersalnych, a zagraniczna – żurawi wysokospecjalistycznych.
2.1.2. Dźwigi pływające
Dźwigi pływające składają się z nadbudówki (samego dźwigu) i pontonu (statek specjalny lub dźwig).
Nadbudowa dźwigu pływającego, statku dźwigowego itp.- konstrukcja podnosząca zainstalowana na pokładzie otwartym, przeznaczona do przenoszenia urządzenia podnoszącego i ładunku.
pontony podobnie jak kadłuby statków składają się z elementów poprzecznych (wręgi i pokładniki) oraz podłużnych (stępka i kilofy) obłożonych blachą stalową.
Rama - zakrzywiona belka poprzeczna zestawu kadłuba statku, zapewniająca wytrzymałość i stabilność burt i dna.
Belka- belka poprzeczna łącząca prawą i lewą gałąź ramy. Na belkach kładzie się pokład.
Kil- połączenie podłużne założone w płaszczyźnie średnicowej naczynia w pobliżu dna, rozciągające się na całej jego długości. Stępkę statków dużych i średnich (pion wewnętrzny) stanowi blacha instalowana w płaszczyźnie średnicowej pomiędzy poszyciem dna podwójnego a poszyciem dna. Aby zmniejszyć kołysanie, stępki boczne są instalowane normalnie na zewnętrznym poszyciu statku. Długość stępki bocznej wynosi do 2/3 długości statku.
Kilson- połączenie wzdłużne na statkach bez dna podwójnego, instalowane wzdłuż dna i łączące dolne części wręgów w celu ich wspólnej pracy.
Kształt pontonów jest równoległościanem z zaokrąglonymi narożnikami lub ma kontury statku. Pontony o prostokątnych narożnikach mają płaskie dno i wycięcie w części rufowej (lub dziobowej) (ryc. 2.10). Czasami żuraw montowany jest na dwóch pontonach (żuraw katamaranowy). W takich przypadkach każdy ponton ma mniej lub bardziej wyraźny kil i kształt zbliżony do kształtu kadłubów zwykłych statków. Pontony pływających dźwigów są czasami niezatapialne, tj. dostarczane z przegrodami wzdłużnymi i poprzecznymi. Aby zwiększyć stabilność dźwigu pływającego, tj. możliwość powrotu z pozycji wychylonej do pozycji równowagi po zdjęciu obciążenia, należy w miarę możliwości obniżyć jej środek ciężkości. W tym celu należy unikać wysokich nadbudówek, a wewnątrz pontonu umieścić pomieszczenia mieszkalne dla ekipy dźwigowej oraz magazyny. Tylko sterówka (kabina sterownicza statku), kuchnia (kuchnia okrętowa) i jadalnia są wynoszone na pokład. Wewnątrz pontonu, wzdłuż jego burt, znajdują się zbiorniki (zbiorniki) na olej napędowy i słodką wodę.
Dźwigi pływające mogą być samobieżne i niesamobieżne. Jeśli żuraw ma obsługiwać kilka portów lub pokonywać duże odległości, musi być samobieżny. W tym przypadku stosuje się pontony z konturami statku. Żurawie zdatne do żeglugi mają pontony z konturami statków, wiele ciężkich dźwigów wykorzystuje pontony katamaranów (Ker-ogly o udźwigu 250 ton; dźwig z Vartsila w Finlandii o udźwigu 1600 ton itp.).
Zgodnie z projektem górnej konstrukcji dźwigi pływające można podzielić na nieobrotowe, pełnoobrotowe i kombinowane.
naprawił(maszt, suwnica, z wahadłowymi (przechylnymi) strzałkami). Żurawie masztowe (ze stałymi masztami) mają prostą konstrukcję i niski koszt. Poziomy ruch ładunku odbywa się podczas przemieszczania pontonu, więc wydajność takich dźwigów jest bardzo mała.

Ryż. 2.10. Schemat pontonu pływającego dźwigu
Do pracy z dużymi ciężarami bardziej odpowiednie są dźwigi pływające z wysięgnikami przechylnymi. Przy zmiennym zasięgu ich wydajność jest większa niż w przypadku masztów. Żurawie te mają prostą konstrukcję, niski koszt i duży udźwig. Wysięgnik żurawia składa się z dwóch słupków zbiegających się do góry pod ostrym kątem i jest zamocowany zawiasowo na dziobie pontonu. Wysięgnik jest podnoszony za pomocą sztywnego pręta (siłownik hydrauliczny, zębatka lub urządzenie śrubowe) lub za pomocą mechanizmu wciągnika łańcuchowego (na przykład w dźwigu Vityaz). Wysięgnik w pozycji transportowej zamocowany jest na specjalnej podporze (Rys. 2.3). Do wykonania tej operacji służy wysięgnik i wciągarka pomocnicza.
Pływająca suwnica bramowa to konwencjonalna suwnica bramowa zamontowana na pontonie. Mostek dźwigu znajduje się wzdłuż osi podłużnej pontonu, a jego jedyna konsola wystaje poza obrysy pontonu na odległość, zwaną niekiedy zasięgiem zewnętrznym. Zasięg zewnętrzny wynosi zwykle 7…10 m. Udźwig pływających suwnic bramowych sięga 500 ton. Jednak ze względu na duże zużycie metalu, pływające suwnice bramowe nie są produkowane w naszym kraju.
Pełna rotacja(uniwersalne) dźwigi są dostarczane z obrotnicą lub kolumną. Obecnie szeroko stosowane są żurawie obrotowe z wysięgnikiem uchylnym. Są najbardziej produktywni. Ich strzały nie tylko przechylają się, ale także obracają wokół pionowej osi. Udźwig żurawi obrotowych jest bardzo zróżnicowany i może sięgać setek ton.
Żurawie pełnoobrotowe obejmują dźwig Bogatyr o udźwigu 300 ton i wysięgu zewnętrznym 10,4 m z wysokością podnoszenia głównego haka (haka) nad poziom morza 40 m, a także morski statek transportowo-montażowy Ilya Muromiec. Ten ostatni ma udźwig 2 × 300 ton przy zewnętrznym wysięgu 31 m. Wysokość statku dźwigu z podniesionym wysięgnikiem wynosi 110 m. Dźwigi te są w stanie przekroczyć morze przy burzy o sile 6 ... 7 punktów i wiatr 9 punktów. Autonomia żeglugi 20 dni. Prędkość dźwigu „Bogatyr” wynosi 6 węzłów, a prędkość statku dźwigowego „Ilya Muromets” wynosi 9 węzłów. Oba statki wyposażone są w zestaw mechanizmów i urządzeń zapewniających wysoki stopień mechanizacji procesów głównych i pomocniczych. W pozycji transportowej bomy obu opisywanych jednostek umieszczone są na specjalnych podporach i zamocowane.
Łączny. Należą do nich np. pływające suwnice bramowe, po których mostku porusza się suwnica obrotowa.
Dominującym typem układu wysięgnika żurawi pływających jest wysięgnik prosty z wciągnikiem łańcuchowym wyrównawczym; rzadziej stosuje się urządzenia z wysięgnikiem przegubowym, ale ich stosowanie wiąże się z trudnościami w układaniu w pozycji złożonej.
Aby zapobiec przechylaniu się wysięgników prostych żurawi morskich podczas falowania, pod działaniem sił bezwładności i wiatru, a także w przypadku zerwania i upuszczenia ładunku, wysięgniki wyposaża się w zabezpieczenia w postaci ograniczników lub specjalnych układów równoważących . W żurawiach Magnus wysięgnik z ładunkiem jest podtrzymywany przez sztywną podporę.
Wraz z rozwojem konstrukcji wysięgników dokonano przejścia od wysięgników kratowych i niestężonych do wysięgników o pełnych ścianach (w kształcie pudełka, rzadziej rurowych) w konstrukcji belkowej lub podwieszonej. W dźwigach z ostatnich lat produkcji częściej stosuje się strzały w kształcie pudełka z blachy. Znane są jednak wysięgniki kratowe niektórych zagranicznych żurawi o bardzo dużym udźwigu (dźwig Balder, patrz ryc. 2.8). W przypadku modernizacji żurawi wysięgniki podstawowe są często poszerzane o dodatkowe wysięgniki wantowe (patrz rys. 2.6), co pozwala znacznie zwiększyć maksymalny zasięg i wysokość podnoszenia, a jednocześnie zapewnić szerokie ujednolicenie z modelem podstawowym.
Głównymi rodzajami łożysk wieńcowych do dźwigów pływających są kolumny obrotowe i nieobrotowe, wielorolkowe koło obrotowe, wieniec obrotowy w postaci dwurzędowego łożyska wałeczkowego. Istnieje tendencja do stosowania obrotowych kół w postaci łożysk tocznych w dźwigach o udźwigu do 500 ton. W cięższych żurawiach nadal stosuje się wielorolkowe kręgi obrotowe, trwają prace nad stworzeniem segmentowych łożysk wałeczkowych do takich żurawi.
Mechanizmy podnoszące stosowane w dźwigach pływających to wciągarki chwytakowe z niezależnymi bębnami i przełącznikami różnicowymi. Według GOST 5534 zapewniona jest zmniejszona prędkość lądowania chwytaka na ładunku, która wynosi 20 ... 30% prędkości głównej. Istnieje możliwość wymiany chwytaka na zawieszenie hakowe.
Mechanizmy obrotowe (jeden lub dwa) często mają przekładnie walcowo-stożkowe ze sprzęgłami wielopłytkowymi o ograniczającym momencie obrotowym i otwartym kołem zębatym lub zębnikiem.
Mechanizm zmiany odjazdu - sektorowy z montażem sektorów na dźwigni przeciwwagi lub hydrauliczny z cylindrem hydraulicznym połączonym z platformą i drążkiem połączonym z dźwignią przeciwwagi. Znane są dźwigi z mechanizmem śrubowym do zmiany odjazdu. Konstrukcje mechanizmów zmiany wysięgu przedstawiono w rozdziale 1 „Dźwigi bramowe”.
Pływające żurawie chwytakowe w portach rzecznych i morskich są eksploatowane bardzo intensywnie. Dla mechanizmów podnoszących wartości PV sięgają 75…80%, mechanizmów obrotowych – 75%, mechanizmów zmiany wyjazdu – 50%, ilość wtrąceń na godzinę – 600.
2.1.3. Funkcje obliczeniowe
Geometria pontonu. Podczas projektowania i obliczeń ponton jest rozpatrywany w trzech wzajemnie prostopadłych płaszczyznach (patrz ryc. 2.10). Płaszczyzna główna to płaszczyzna pozioma styczna do dna pontonu. Jedna z płaszczyzn pionowych, tzw. płaszczyzna średnicowa, biegnie wzdłuż pontonu i dzieli go na równe części. Za oś przyjmuje się linię przecięcia płaszczyzny głównej i płaszczyzny średnicowej X. Kolejna pionowa płaszczyzna jest rysowana przez środek długości pontonu i jest nazywana płaszczyzną ramy środkowej lub części środkowej. Za oś przyjmuje się linię przecięcia płaszczyzny głównej i środkowej Y, a linia przecięcia płaszczyzny środkowej i średnicowej – za osią Z.
Płaszczyzna równoległa do płaszczyzny części środkowej i przechodząca przez oś obrotu żurawia obrotowego nazywana jest środkową. Linie przecięcia powierzchni kadłuba pontonu z płaszczyznami równoległymi do płaszczyzny śródokręcia nazywane są wręgami (tak też nazywają się poprzeczne elementy statku, które tworzą wręg jego kadłuba). Linie przecięcia powierzchni kadłuba pontonu z płaszczyznami równoległymi do płaszczyzny głównej nazywane są wodnicami. Ta sama nazwa nosi ślad po powierzchni wody na korpusie pontonu.
Ponieważ ponton znajdujący się na wodzie można przechylać, powstałą linię wodną nazywa się obecną. Płaszczyzna bieżącej wodnicy, nierównoległa do płaszczyzn pozostałych wodnic, dzieli ponton na dwie części: nawodną i podwodną. Linia wodna odpowiadająca położeniu na wodzie dźwigu bez ładunku, wyważonego w taki sposób, że jego główna płaszczyzna jest równoległa do powierzchni wody, nazywana jest wodnicą główną.
Pochylenie statku na dziób lub rufę nazywa się przegłębieniem, a nachylenie statku na prawą burtę lub lewą burtę nazywa się przechyleniem. Narożnik ψ (patrz ryc. 2.10) między linią prądu a główną linią wodną w płaszczyźnie średnicowej nazywa się kątem przegłębienia, a kątem θ między tymi samymi liniami w płaszczyźnie środkowej - kąt przechyłu. Po przycięciu do dziobu i przetoczeniu w kierunku bomu, kąty ψ I θ są uważane za pozytywne.
Długość Ł ponton jest zwykle mierzony wzdłuż głównej linii wodnej, szacowanej szerokości B ponton - w najszerszym miejscu pontonu wzdłuż linii wodnej i szacowanej wysokości H boki - od płaszczyzny głównej do linii bocznej pokładu (patrz ryc. 2.10). Odległość od płaszczyzny głównej do bieżącej linii wodnej nazywana jest zanurzeniem T ponton, który ma różne znaczenia na dziobie pontonu T H i na rufie T K. Różnica wartości T H – T K zwany trymerem. Różnica między wysokością a zanurzeniem HT zwany wysokością F Darmowa deska. Jeżeli kształt pontonu nie jest równoległościanem, tj. ma gładkie kontury, to do obliczeń tworzą tzw. rysunek teoretyczny, który określa zewnętrzny kształt kadłuba (kilka przekrojów wzdłuż wręgów). W przypadku pontonów prostokątnych nie ma potrzeby sporządzania takiego rysunku.
Tom V podwodna część pontonu nazywana jest wypornością objętościową. Środek ciężkości tej objętości nazywany jest środkiem wielkości i jest oznaczony jako CV. Masa wody w objętości V zwane przemieszczeniem masy D.
Stateczność dźwigów pływających. Stateczność - zdolność statku do powrotu do położenia równowagi po ustaniu działania sił powodujących jego przechylenie.
Funkcje obliczania stateczności żurawi pływających są w dużej mierze ograniczone do uwzględnienia wpływu przechyłu i przegłębienia. Żuraw bez ładunku należy trymować do rufy, a z ładunkiem do dziobu. Jeżeli wysięgnik znajduje się w płaszczyźnie środkowej bez ładunku, żuraw powinien przetoczyć się w kierunku przeciwwagi, az ładunkiem w kierunku ładunku. Zmiana odejścia spowodowana przechyleniem lub trymem może wynosić kilka metrów. Na przewidywany odjazd należy wziąć odjazd, który posiada dźwig z poziomym położeniem pontonu.
W przypadku żurawia z ładunkiem część obrotowa żurawia z przeciwwagą tworzy moment, który częściowo równoważy moment obciążenia i jest nazywany momentem równoważącym (patrz ryc. 2.10): M Y \u003d G K y K , Gdzie G K- ciężar nadbudowy; y K- odległość od osi obrotu żurawia do środka ciężkości konstrukcji nośnej (z uwzględnieniem przeciwwag).
Dla żurawi z ruchomymi przeciwwagami moment równoważący wyznacza się jako sumę momentów od ciężarów nadbudowy i przeciwwag.
Moment obciążenia M G = GR,Gdzie G- masa ładunku z zawieszeniem hakowym; R- lot strzały. Stosunek momentu równoważącego do momentu obciążenia nazywany jest współczynnikiem równoważącym φ = M U / M G.
Aby określić momenty przechylające i przegłębiające, należy wziąć pod uwagę rys. 2.11, który pokazuje ponton i bom w planie. Masa obrotowej części żurawia z ładunkiem G K stosowane na odległość mi poza osią O 1 obrót wysięgnika. Działanie ciężaru G K na ramieniu mi można zastąpić siłą pionową G K w punkcie O 1 i chwila G K e w płaszczyźnie strzałki. Ciężar pontonu z balastem G0 przymocowany w punkcie O2. Ponadto na żuraw działa moment pionowy od obciążenia wiatrem, który ma składowe względem odpowiednich osi M IN I M BY. Wtedy moment przechylający jest określany z zależności formy M K = M X = G K mie sałata φ + M BX i moment przycinania M D \u003d M Y \u003d G K e grzech φ + M do Y.
Aby określić moment przywracania, rozważ ryc. 2.12, który przedstawia przekrój pontonu wzdłuż płaszczyzny owręża w położeniach przed i po zastosowaniu momentu przechylającego. Wskazano środek ciężkości dźwigu z pontonem DH. Dźwig w spoczynku jest poddawany działaniu sił pionowych o sile wypadkowej N i siła wyporu re = Vρg, Gdzie V- przemieszczona objętość; ρ - gęstość wody; G- przyśpieszenie grawitacyjne. Zgodnie z prawem Archimedesa, D=N.
W stanie równowagi sił N I D działają wzdłuż jednej pionowej linii przechodzącej przez środek ciężkości i środek wielkości i nazywa się osią nawigacji. W tym przypadku kąt przechyłu może mieć pewne znaczenie. θ (patrz rys. 2.10).

Ryż. 2.11. Schemat wyznaczania momentów przechyłu i przegłębienia

Ryż. 2.12. Schemat pozycji pontonu do ( A) i po ( B) zastosowania momentu przechylającego
Załóżmy, że na żuraw działa statyczny moment przechylający M K, spowodowane na przykład ciężarem ładunku G na końcu wysięgnika dźwigu. W tym przypadku środek wielkości przesuwa się. Zmiana sił D I G w porównaniu ze stanem równowagi można pominąć, ponieważ ciężar ładunku jest znacznie mniejszy niż ciężar żurawia. Potem siła D w pochylonej pozycji żurawia zostanie zastosowany w punkcie CV(ryc. 2.12, B). W takim przypadku nastąpi moment przywracania sił D I N=D na ramieniu lθ równy momentowi przechylającemu M K, tj. , gdzie jest poprzeczną wysokością metacentryczną, tj. odległość od metacentrum do środka ciężkości.
Metacentrum jest punktem F przecięcie osi nawigacji z linią działania siły D, a promień metacentryczny to odległość od metacentrum F do środka wielkości.
Przy przycinaniu pod kątem ψ
moment przywracania jest równy momentowi przycinania M D, tj. ![]() , gdzie jest podłużną wysokością metacentryczną; A- odległość między środkami ciężkości i wielkość. Iloczyny i nazywane są współczynnikami stabilności statycznej.
, gdzie jest podłużną wysokością metacentryczną; A- odległość między środkami ciężkości i wielkość. Iloczyny i nazywane są współczynnikami stabilności statycznej.
Zdefiniujmy promienie metacentryczne i . Z teorii statku wiadomo, co następuje:
1) przy małych kątach przechyłu θ i przyciąć ψ położenie metacentrum F niezmieniona, a środek wielkości przesuwa się po łuku okręgu opisanego wokół metacentrum;
2) promień metacentryczny R=J/V, Gdzie J- moment bezwładności obszaru ograniczonego linią wody względem odpowiedniej osi, wokół której przechylony jest żuraw.
Dla żurawia w spoczynku obszar ograniczony linią wodną wynosi BL.
Dla pontonu prostokątnego (z wyłączeniem konturów i skosów) momenty bezwładności względem głównych osi J X \u003d L.B. 3/12; J Y = B L 3 / 12 i wypartej objętości wody V = B L T. W tym przypadku promienie metacentryczne; ![]() .
.
Zatem kąty przechyłu i przegłębienia, w zależności od momentów przechyłu i przegłębienia, są określane z wyrażeń
![]() ;
; ![]() .
.
|

Ryż. 2.13. Schematy stateczności dźwigu pływającego: A– statyczny M VK(Q); B - dynamiczny B(Q)
W przypadku żurawi obrotowych z wysięgnikiem obrotowym kąty te są zmienne zarówno pod względem zasięgu, jak i kąta obrotu.
Momenty przywracania podczas przechyłu i przegłębienia określają wzory postaci:
; (2.1)
Przy kątach przechyłu większych niż 15° wzór (2.1) nie ma zastosowania, a moment przywracający M VK w zależności od kąta θ zmienia się zgodnie ze statycznym wykresem stateczności (rys. 2.13). Ze stopniowym wzrostem momentu przechylającego do wartości równej maksymalnej wartości momentu przywracającego M VK max na schemacie kąt przechyłu sięga θ M , a żuraw będzie niestabilny, ponieważ każde przypadkowe pochylenie w kierunku przechyłu spowoduje jego przewrócenie. Zastosowanie momentów przechylających M θ ³ M VK maksymalna jest nieprawidłowa. Kropka DO(wykres zachodu słońca) charakteryzuje graniczny kąt przechyłu θ P , powyżej którego M VK< 0 i dźwig się przewraca. Schemat stateczności statycznej zawarty jest w obowiązkowej dokumentacji żurawia; w pracy podano jego budowę według rysunku pontonu lub według przybliżonych wzorów.
Przy nagłym (lub trwającym mniej niż pół okresu naturalnych drgań) przyłożeniu momentu dynamicznego do nie przechylonego pontonu M D(patrz rys. 2.13, A), która pozostaje stała w przyszłości, w początkowym okresie rzutu M D > M VK a statek będzie się toczył z przyspieszeniem, gromadząc energię kinetyczną. Osiągnięcie kąta przechyłu statycznego Q(kropka W), statek będzie się dalej przechylać aż do dynamicznego kąta przechyłu q D, gdy zapas energii kinetycznej zostaje zużyty do pokonania pracy momentu przywracającego i sił oporu (pkt Z, odpowiadające równości obszarów OAB I CBE). Na q D £ 10…15 O(ryc. 2.13, A) można to rozważyć q D = 2Q(biorąc pod uwagę wodoodporność q D= 2 XQ, Gdzie X- współczynnik tłumienia ( X" 0,7); w obecności początkowego kąta przechylenia ± q0 dynamiczny kąt przechylenia q D = ± q0+ 2Q. Przewracający dynamiczny moment M D. OPR i kąt nachylenia q E.ODA określone przez znalezienie linii AE, który odcina równe obszary na statycznym diagramie stateczności OAB I WME(ryc. 2.13, B).
Wykres stabilności dynamicznej (patrz ryc. 2.13) jest wykresem zależności pracy momentu przywracającego B= D od kąta przechyłu ( l q- ramię momentu przywracającego podczas przechyłu (patrz rys. 2.12); jest krzywą całkową w odniesieniu do wykresu stateczności statycznej; ogrom d b = A b / re= zwane ramieniem stabilności dynamicznej. Chwila przechyłu ZA K. = M re q re = re re K, Gdzie re K. = ZA K. / re re = M re q re / re– specyficzna praca momentu przechylającego. Harmonogram K (q D) jest linia prosta Z, przechodzenie przez punkty O I F ze współrzędnymi (1 rad, M D); Kropka R skrzyżowania (patrz ryc. 2.13, A) lub dotknij (patrz ryc. 2.13, B) wykresy stateczności dynamicznej z linią prostą Z określa dynamiczny kąt przechylenia q D (A) lub kąt przewrócenia z przechyleniem dynamicznym q E.ODA (B).
Dynamiczne przechylenie (lub trymowanie) występuje, gdy ładunek jest podrywany lub gdy ładunek pęka. na ryc. 2.14 pokazuje położenie lustra wodnego względem pontonu dla nieobciążonego dźwigu (położenie równowagi 1 pod kątem brzegowym q0) i załadowany rolką statyczną (pozycja 2 pod kątem brzegowym Q). Do normalnej pracy żurawia pożądane jest, aby wartości bezwzględne kątów przechyłu dla żurawia załadowanego i pustego były równe. Gdy ładunek pęknie, żuraw będzie oscylować wokół położenia równowagi 1 z amplitudą Δ Q(patrz ryc. 2.14), osiągając pozycję 3 przy dynamicznym kącie przechylenia q DIN = q 0+ Δ Q. Wartości tych ostatnich są dokładniejsze, jeśli weźmie się pod uwagę wodoodporność zgodnie ze wzorem
q DIN= q0+ (0,5 – 0,7) ∆ Q.

Ryż. 2.14. Schemat pontonu do wyznaczania przechyłu dynamicznego
Wyznaczenie momentu wywracającego i kąta przechyłu dynamicznego w stanie roboczym przy zerwaniu ładunku zgodnie z wykresem stateczności dynamicznej oraz sprawdzenie stateczności żurawia podczas przejścia, holowania, w stanie spoczynku; w pracy szczegółowo rozpatrzono wyznaczenie momentu wywracającego w stanie złożonym oraz maksymalnego momentu przywracającego w stanie niepracującym.
Obciążenia mechanizmu obrotu i zmiany odjazdu. na ryc. 2.15, A pokazany poprzecznie (w płaszczyźnie Y) i podłużne (w płaszczyźnie X) przekrój pontonu po przechyleniu pod kątem Q i kąt przycięcia ψ .
Waga G K obrotowa część żurawia z ładunkiem ma elementy S I S X, działające w płaszczyźnie obrotu i określone zależnościami formy S Y \u003d G K grzech Q I S X \u003d G K grzech ψ .
Dla żurawia pływającego dodatkowy moment wywołany przechyleniem i przegłębieniem działający na mechanizm obrotowy (rys. 2.11) określa wzór
To wyrażenie można eksplorować do maksimum M φ. W szczególności, jeśli składowa momentu przycinania M ψ \u003d G K a - G 0 b \u003d 0(zrównoważony ponton), następnie maksimum M φ osiągnięty o godz φ = 45o.
Siły S X I S mieć składowe działające w płaszczyźnie obrotu bomu i prostopadle do niej. Składowe działające prostopadle do płaszczyzny obrotu wysięgnika tworzą moment obciążający mechanizm obrotu, na który wyrażenie otrzymano powyżej. Całkowita siła T siły składowe S X I S w płaszczyźnie obrotu bomu jest określony przez wyrażenie formy T \u003d S X grzech φ + S Y sałata φ = G K ( grzech Q grzech φ – grzech ψ sałata φ).
Siła ta działa w płaszczyźnie obrotu bomu i jest skierowana wzdłuż pontonu. na ryc. 2.15, B pokazany rozkład masy G K dla siły R, prostopadłej do płaszczyzny głównej pontonu i uwzględnionej w obliczeniach mechanizmu zmiany zwisu oraz od siły T, równolegle do osi wzdłużnej pontonu i tworząc dodatkowe obciążenie spowodowane przechyleniem i przegłębieniem. Tak więc w środku ciężkości każdego węzła obrotowej części żurawia (wysięgnika, tułowia itp.) G ja powstaje moc T ja spowodowane rolowaniem i przycinaniem. Dodatkowa chwila M, mechanizm ładujący do zmiany odjazdu, jest określony wzorem .
Obciążenia od sił bezwładności, działające na żuraw podczas przechyłów poprzecznych i wzdłużnych statku, szczegółowo przedstawiono w pracach.
Niezatapialność- zdolność statku do utrzymania minimalnej niezbędnej pływalności i stateczności po zalaniu jednego lub więcej przedziałów kadłuba. Obliczenie niezatapialności zostało szczegółowo przedstawione w pracy.
Cechy konstrukcyjne i charakterystyka dźwigów pływających
1. Dźwigi do budowy rzek
Do budowy portów i mostów na śródlądowych drogach wodnych uniwersalne żurawie pływające o udźwigu od 10 do 60 ton, składane o udźwigu 30-100 ton, palownice o udźwigu 25-30 ton oraz łączone lądowe stosowane są dźwigi instalowane na obiektach pływających.
Krany uniwersalne
Zakład wyprodukował dźwig "Kirovets" typu Kpl G / K 10-30 o udźwigu 10 ton dla wszystkich odjazdów wysięgnika. Kirow w Leningradzie w występie z muszli i haka.
Żuraw jest w pełni obrotowy, wysięgnik o konstrukcji kratowej z wysięgnikiem jest połączony obrotowo z ruchomą przeciwwagą w celu wyważenia. Podczas zmiany zasięgu wysięgnik porusza się w kierunku przeciwnym do wysięgnika (opuszcza się, gdy wysięgnik jest podniesiony), dzięki czemu przy zmianie zasięgu ładunek pozostaje na tej samej wysokości.
Obrotowa część żurawia z zamocowanym na nim wysięgnikiem oraz wszystkimi mechanizmami podnoszenia i obracania osadzona jest na rolkach poruszających się po dolnej koronie, umieszczonych na klatce belkowej o wysokości 2,1 m od pokładu.
Silniki prądu przemiennego do żurawi o napięciu 220-380 V, o łącznej mocy 267 kw. Zasilanie zapewnia agregat prądotwórczy diesla umieszczony w kadłubie pontonu lub na brzegu. Sterowanie dźwigiem jest elektromechaniczne.
Żuraw nie ma własnego napędu i porusza się za pomocą końcówek cumowniczych i wciągarek.
Aby ustawić żuraw w pozycji transportowej, wysięgnik jest opuszczany; po demontażu mechanizmu zmiany wysięgu wysięgnika wysokość żurawia zmniejsza się do 10 m.
Żuraw jest przeznaczony do operacji załadunku i rozładunku i dlatego ma wysokie prędkości wszystkich operacji. Ze względu na niewystarczającą nośność dźwig nie jest zalecany do prac instalacyjnych, ale może być używany jako dźwig pomocniczy w betoniarni do dostarczania kruszyw i cementu z wody, do rozładunku drewna i innych towarów. Dzięki niewielkiej masie montowanych elementów żuraw może być również wykorzystywany do prac budowlanych.

Ryż. 1. Schemat uniwersalnego żurawia pływającego typu Kpl G/K 10-30: 1-wahacz i przeciwwaga wysięgnika; 2-ciąg do zmiany zasięgu wysięgnika; 3- maszynownia z kabiną sterowniczą; 4 - mechanizm obrotowy
Dźwig firmy „Valmet” (Finlandia) zbudowany w 1958 roku o udźwigu 10 ton (ryc. 2) w pełni obrotowy, wyposażony w hak i chwytak.
Wysięgnik żurawia kratowego o długości 28 m z mechanizmem zębatkowym do zmiany wysięgu. Żurawie tej firmy produkowane są również ze strzałą zakończoną wysięgnikiem.
Obrotnica żurawia z umieszczonymi na niej mechanizmami podnoszącymi, kabina sterownicza i wysięgnik zamocowane są na wózkach balansowych poruszających się po wieńcu szynowym ułożonym na cokole belki na pokładzie pontonu. Ruchoma część żurawia jest przymocowana do stałej podstawy za pomocą wydrążonego osiowego sworznia z łożyskami.
Silniki żurawia AC (380 V), niezależne dla każdego ruchu. Sterowanie dźwigiem jest elektromechaniczne. Elektrownia składa się z dwóch silników Diesla o mocy 180 KM każdy. Z. z alternatorami o mocy 150 kVA.
W pontonie dźwigu znajdują się pomieszczenia mieszkalne, a na pokładzie jadalnia, kambuz, prysznic, spiżarnia i inne pomieszczenia pomocnicze. Zespół żurawia składa się z 11 osób. podczas pracy dwuzmianowej. Żuraw nie ma własnego napędu i podczas pracy porusza się na końcach cumowania.
Nie przewidziano opuszczania wysięgnika dźwigu na pontonie do pozycji transportowej, dlatego jego wysokość od wody w stanie niezmontowanym wynosi 25 m, przez co żuraw nie może przejść pod mostami. Podczas demontażu wysięgnika wysokość żurawia zmniejsza się do 16 m, a przy demontażu dźwigni przeciwwagi wysięgnika - do 12 m. W tej pozycji żuraw staje się transportowalny po śródlądowych drogach wodnych.

Ryż. Ryc. 2. Schemat uniwersalnego dźwigu pływającego firmy „Valmet”: 1 - urządzenie dźwigniowe z przeciwwagą wysięgnika; 2-zębatowy mechanizm zmiany zasięgu wysięgnika; 3- kabina sterownicza; 4 - agregat prądotwórczy na olej napędowy; 5 - maszynownia
Żuraw jest przeznaczony głównie do operacji załadunku i rozładunku. Przy budowie obiektów portowych i mostowych żuraw może być wykorzystany jako dźwig pomocniczy do operacji przeładunkowych ładunków masowych oraz do budowy nabrzeży z grodzic drewnianych i metalowych oraz lekkich grodzic i pali żelbetowych.
Żuraw typu Kpl 15-30 (ryc. 3) jest produkowany przez fabrykę Teplokhod (ZSRR).
Żuraw pełnoobrotowy z jednym hakiem o udźwigu 15 ton na wszystkich odjazdach. Hak można zastąpić chwytakiem. Wysięgnik żurawia połączony jest obrotowo z ruchomą przeciwwagą, co znacznie ułatwia zmianę zasięgu.
Część obrotowa żurawia wraz ze wszystkimi mechanizmami podnoszącymi oraz wysięgnikiem spoczywa na rolkach toczących się po żyłce, osadzonych na ramie belkowej nad pokładem pontonu.
Silniki elektryczne żurawia trójfazowe 220/380 V napędzane są przez agregat prądotwórczy diesla o mocy 375 kVA, umieszczony w kadłubie statku (diesel typ 84-23/30, generator MS 375-750). Pneumatyczne sterowanie dźwigiem. Zespół składa się z 10 osób. podczas pracy dwuzmianowej.

Ryż. 3. Schemat uniwersalnego dźwigu pływającego typu Kpl 15-30: 1 - kabina sterownicza; 2 - urządzenie dźwigniowe z napędem hydraulicznym do zmiany wysięgnika; 3 - przeciwwaga wysięgnika; 4 - maszynownia; 5 - stojak do układania wysięgnika w pozycji transportowej
Żuraw nie jest samobieżny i porusza się podczas pracy za pomocą elektrycznych kabestanów oraz jest holowany na duże odległości. W pozycji transportowej wysięgnik umieszczony jest wzdłuż pontonu na stojaku.
Żuraw jest przystosowany do warunków żeglugi rzecznej i jest przeznaczony do obsługi ładunków sypkich i masowych. Jednak ze względu na swoje właściwości może być z powodzeniem stosowany do budowy nabrzeży rzecznych z grodzic pryzmatycznych i trójników żelbetowych. Dzięki dużemu zasięgowi może wbijać pale kotwiące, montować płyty kotwiące i montować pręty kotwiące. Duża wysokość haka pozwala na załadunek pali o długości do 20 m. Żuraw można stosować w połączeniu z żurawiem o dużym udźwigu (50-100 ton), ale o mniejszym wysięgu i wysokości podnoszenia (np. zainstalować tłumik drgań dla pustaków betonowych).
ściany betonowe o profilu kątowym podczas ich wznoszenia „do wody”. Do montażu nabrzeży morskich i prac mostowych żuraw może być używany jako żuraw pomocniczy tylko wtedy, gdy dostępny jest żuraw o większym udźwigu.
Dźwigi Valmet i typ Kpl G/K 10-30 są dostępne w małych ilościach iw związku z tym ich zastosowanie jest ograniczone do portów macierzystych. Żurawie Bleichert i typ Kpl 15-30 znalazły szersze zastosowanie i są zalecane do wykonywania rzecznych robót hydrotechnicznych.
Oprócz opisanych dźwigów, w rzecznym budownictwie hydrotechnicznym stosuje się szereg uniwersalnych dźwigów pływających o udźwigu 30-60 ton, które są przeznaczone głównie do budownictwa na morzu i zostały omówione poniżej.
Dźwigi składane
Żuraw typu PRK-30/40, zaprojektowany przez firmę Lengiprotransmost, nieobrotowy, montowany jest na pontonach składających się z 12 pontonów. Udźwig żurawia przy normalnej długości wysięgnika 32,5 m i wysięgu 2 m od końca (pawęży) siłownika wynosi 40 ton, przy zerowym wysięgu - 45 ton.Przy montażu skróconego wysięgnika o długości 26,3 m, udźwig przy zerowym zasięgu wzrasta do 47,5 ton. Udźwig dodatkowego haka 10 t na wszystkich wysięgnikach.
Wszystkie konstrukcje dźwigów są spawane; maksymalny ciężar elementu to 4 t. Wysięgnik żurawia składa się z dwóch ramion w dolnej części, które następnie łączą się w jedno. Wysięgnik żurawia połączony jest za pomocą zastrzałów z wahliwą podporą rurową w kształcie litery A 3. Zmiana zasięgu odbywa się za pomocą wciągnika łańcuchowego z prędkością 0,85 m/min. Kafar z rozpórką teleskopową można przymocować do górnej części wysięgnika w celu wbijania pali o wadze do 12 ton młotem 8-tonowym. pod plashoutem i od plahoutu. Żuraw jest montowany na ramie składającej się z dwuteowników i kanałów na połączeniach śrubowych, układanych na pontonach i mocowanych do nich.
Mechanizmy dźwigowe składają się z wysięgnika napędowego i wciągarek ładunkowych 1typ UL-5 o udźwigu 5 ton i elektrowni typu ZhES-60. Zarządzanie wszystkimi mechanizmami koncentruje się w kokpicie. Żuraw jest wyposażony w automatyczne wyłączniki krańcowe ładunku i wysięgnika. Do operacji kotwiczenia i cumowania zainstalowane są cztery wciągarki napędowe typu UL-3 o udźwigu 3 tony, ręczne sanki do podnoszenia kotwic w narożnikach łodzi, pachołki i pasy bel. Ponton otoczony jest błotnikiem i relingiem. Aby przyciąć żuraw, do pontonów rufowych wlewa się 40 ton wody (balast). Ruch dźwigu odbywa się za pomocą dwóch pontonów motorowych, które są częścią rusztowania. Stały zespół dźwigowy składa się z 5 osób. w zmianie.

Ryż. 4. Schemat żurawia pływającego typu PRK-30/40: 1 wysięgnik; 2 wsporniki wysięgnika; 3- wahadłowy wspornik; 4 - wciągnik łańcuchowy wysięgnika; 5 - wyciągarka wysięgnika; 6 - elektrownia ZhES-60; 7 - wciągarki ładunkowe; 8 - klatka belki (rama) dźwigu; 9- kotwica katbalki; 10- balast wodny; 11- teleskopowa podpora wysięgnika palowego; 12 - wysięgnik wiszący kopry; 13 - wciągarki cumownicze; 14 - kabina sterownicza
Żuraw jest przystosowany do warunków rzecznych z rejonem żeglugi „P” (duże rzeki). Wysokość wolnej burty podczas pracy 0,19 m.
Wysokość żurawia z opuszczonym wysięgnikiem wynosi około 14 m, a z opuszczoną podporą wysięgnika około 6 m.
Montaż i demontaż żurawia wykonują żurawie samochodowe typu K-52 i K-104. Do transportu żurawia potrzebnych jest 12 pojazdów MAZ-200 i cztery ZiŁ-150.
Żuraw PRK-30/40 jest łatwy w wykonaniu i montażu, przeznaczony głównie do budowy mostów tymczasowych (w tym do montażu nadbudówek). Może być również stosowany do budowy podpór pod stałe mosty i rzeczne konstrukcje hydrotechniczne.
Głównymi wadami żurawia są brak obrotu wysięgnika oraz mała prędkość podnoszenia ładunku i wysięgnika, co znacznie obniża jego osiągi w porównaniu do uniwersalnych pełnoobrotowych dźwigów pływających.
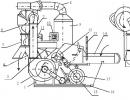
Żuraw typu PRK-100 jest produkowany przez fabryki Ministerstwa Budownictwa Transportowego według projektu Lengiprotransmost. Żuraw montowany jest na pontonie złożonym z 24 pontonów typu KS-3 (zespół główny). Udźwig na haku głównym wynosi 100 t. Przy takim udźwigu żuraw pracuje jako żuraw stacjonarny. Na haku pomocniczym o udźwigu 30 ton żuraw pracuje z obrotem o 90° w obu kierunkach od osi podłużnej. Żuraw można również zamontować na 16 pontonach (lekki montaż); jednocześnie pracuje jako stały o maksymalnym udźwigu 70 ton.
Wysięgnik żurawia jest dwuramienny spawany, składa się z czterech elementów o długości 8-11,5 m, montowanych na śrubach. Wysięgnik jest zamocowany na zawiasie obrotnicy i jest utrzymywany przez klamrę łączącą, która przenosi siłę na rozpórkę 9 i rozciągniętą rozpórkę przeciwwagi. Zmiana odjazdów odbywa się za pomocą wciągnika łańcuchowego wysięgnika.
Górna rama wychylna składa się ze skręcanych dwuteowników. Wszystkie wciągarki ładunkowe, wysięgnikowe i obrotowe, elektrownia i panel sterowania są zainstalowane na ramie. Rama obrotowa porusza się na czterech wózkach równoważących z dwoma rolkami każdy wzdłuż szyny o średnicy 12 m zamontowanej na ramie rozdzielczej. Część obrotowa mocowana jest do dolnej przełącznicy za pomocą środkowego sworznia z łożyskami.
Żuraw jest wyposażony w ograniczniki obciążenia i przechyłu oraz wyłączniki krańcowe obciążenia, wysięgnika i obrotu. Na ramie rozdzielczej zainstalowane są urządzenia klinujące, które zapewniają wyłączenie podczas pracy żurawia z obciążeniem powyżej 30 ton oraz podczas „lekkiego montażu”. Mechanizmy żurawia składają się z wciągarek trakcyjnych UL-8A dla haka głównego i pomocniczego. Zwrot jest wykonywany za pomocą wciągarki o sile uciągu 20 t. Zespół prądotwórczy diesla jest reprezentowany przez silnik wysokoprężny 1-D-150AD o pojemności 150 litrów Z. oraz generator PS-93-4 o mocy 75 kW prądu przemiennego o napięciu 230 V.
Jednocześnie można łączyć cykle pomocniczego podnoszenia i obracania lub podnoszenia wysięgnika, podnoszenia i obracania wysięgnika, operacji cumowania i obracania lub podnoszenia wysięgnika lub podnoszenia pomocniczego.

Ryż. 5. Schemat żurawia pływającego typu PRK-100 (zespół główny): 1- wysięgnik; 2-linkowy wysięgnik; 3- wciągnik łańcuchowy wysięgnika; 4 - stojak; 5 - przeciwwaga; 6 - kotwice windy kotwicznej; 7 - rama rozdzielcza; 8 - górna rama obrotowa; 9 - klamra; 10 - panel kontrolny; 11 - elektrownia; 12 - 15 - odpowiednio wciągarki ładunkowe, obrotowe, bomowe i cumownicze; 16 - pontony balastowe
Na platformie zainstalowane są cztery wciągarki cumownicze typu UL-5 o sile uciągu 5 ton i prędkości liny 5 m/min. Ponton na narożach wyposażony jest w prowadnice w postaci rolek i pachołków, bale do podnoszenia kotwic, dwie kotwice halowe o masie 400 i 300 kg, podnoszone za pomocą windy kotwicznej, odbijacz i reling. Dwa pontony pontonu 16 są wypełnione wodą w celu trymowania żurawia. Pomieszczenia mieszkalne i domowe na dźwigu nie są zapewnione.
Podczas przemieszczania się z ładunkiem żuraw jest holowany przez jednostkę pływającą o mocy co najmniej 600 KM. Z. Żuraw może pracować z falą nie większą niż 1 punkt, ponieważ pokład wznosi się nad powierzchnię wody tylko o 0,3 m. Biorąc pod uwagę, że wysokość żurawia, nawet z wysięgnikiem opuszczonym poziomo, wynosi 16 m, należy go częściowo lub całkowicie rozłożony na czas transportu.
CranPPK-100 przeznaczony jest do zanurzania skorup, montażu podpór prefabrykowanych i montażu podwieszanego nadbudówek żelbetowych, a także do budowy obiektów portów rzecznych. Wadami żurawia jest spadek udźwigu do 30 ton przy skręcaniu oraz małe prędkości wszystkich ruchów (dwa razy wolniejsze niż uniwersalne żurawie pływające). Montaż konstrukcji żelbetowych o masie powyżej 30 ton, który wymaga dużej dokładności celowania, przy braku rotacji, musi być wykonywany za pomocą wciągarek cumowniczych, co jest bardzo trudne. Dlatego użytkowanie tego żurawia należy uznać za tymczasowe do czasu powstania uniwersalnych dźwigów pływających o udźwigu 50 - 100 ton dla warunków rzecznych.
2. Dźwigi do budownictwa offshore
Do budowy falochronów, cumowania i fortyfikacji wybrzeży morskich w ZSRR stosuje się głównie uniwersalne dźwigi pływające o udźwigu od 30 do 100 t. W niektórych przypadkach (na przykład przy budowie fundamentów platform wiertniczych na Morzu Kaspijskim) , używany jest pływający dźwig o udźwigu 250 ton. Za granicą przy budowie masywnych pomostów stosuje się dźwigi pływające o udźwigu 200-400 ton.

Ryż. 6. Krzywe obciążenia żurawia PRK-U0: 1 - hak główny; 2- hak pomocniczy; 3- hak główny do lekkiego montażu
Żurawie uniwersalne o udźwigu 30-60 ton
Firma dźwigowa „Tournay” (USA) wydanie 1940-1945. pełnoobrotowy z dwoma hakami 30 i 8 ton (rys. 7). Mały hak można zastąpić chwytakiem. Wysięgnik kratowy; zmiany zasięgu strzały dokonuje wciągnik łańcuchowy. Maszynownia z wciągarkami ładunkowymi, wysięgnikiem, silnikiem i kabiną sterowniczą obraca się na rolkach wzdłuż korony zamontowanej na klatce belki nad pokładem pontonu.

Ryż. 7. Schemat pływającego 30-tonowego. dźwig „Tournay”: 1 - maszynownie i pomieszczenia diesla; 2- wysięgnik do mocowania stałego bloku wciągnika łańcuchowego wysięgnika; 3 - kabina sterownicza; 4 - obrotowe urządzenie rolkowe; 5 - stojak do układania strzały w pozycji złożonej
Żuraw nie posiada własnego napędu, a jego ruch podczas pracy odbywa się na końcach cumowniczych za pomocą elektrycznych kabestanów. Moc głównego silnika wysokoprężnego instalacji wynosi 150 l. e. pomocniczy - 80 l. Z.
W pontonie dźwigu znajdują się pomieszczenia mieszkalno-biurowe oraz zbiornik paliwa. Żuraw obsługiwany jest przez 19-osobowy zespół. podczas pracy na trzy zmiany.
Ze względu na stosunkowo małą nośność i brak własnego napędu, żuraw w budownictwie portowym wykorzystywany jest jako żuraw pomocniczy w zestawieniu z dźwigiem o większej nośności oraz w akwenie zamkniętym przed falowaniem. Nadaje się również do budowy obiektów portów rzecznych - wygodnie jest dla nich załadować trójniki i prostokątne grodzice żelbetowe i skorupy o średnicy 1,6 m i długości do 16 m. 1 km w porcie Ust-Donieck.
Ponadto żuraw może być używany w budownictwie mostowym do zanurzania skorup, instalowania ram i wsporników montażowych w ramach swojej charakterystyki obciążenia.
Wadą żurawia jest jego duża wysokość w pozycji transportowej - 18 m od poziomu wody. Można ją jednak zmniejszyć do 12 m poprzez demontaż konstrukcji mocującej stałych bloków wysięgnika.
Samobieżny 50-tonowy dźwig „Bleichert” (NRD) był szeroko stosowany w portach morskich ZSRR do załadunku i rozładunku oraz prac budowlanych.
Żuraw jest w pełni obrotowy, wyposażony w trzy niezależne zaczepy: główny o udźwigu 50 ton, pomocniczy - 10 ton, który można zastąpić chwytakiem, oraz drugi pomocniczy - 5 ton, przesuwany na wózku wzdłuż dolnej części wysięgnika („kot”).
Haki o różnym udźwigu zapewniają żurawiowi wszechstronność i ekonomiczność, ponieważ małe ładunki są przetwarzane przez haki o małym udźwigu bez marnowania energii na jałową pracę głównych wciągarek ładunkowych.
Wysięgnik żurawia kratowego z wciągnikiem łańcuchowym do zmiany wysięgów. Maszynownia z mechanizmami podnoszącymi, pulpitem sterowniczym, wysięgnikiem i stałą przeciwwagą znajduje się na obrotnicy, która obraca się wokół sworznia osiowego na rolkach połączonych klatką. Rolki toczą się wzdłuż korony, zamontowanej na klatce belki, po pokładzie pontonu.
Całkowita moc silników elektrycznych do operacji ładunkowych i skrętu wynosi 300 kW; Napięcie stałe 220 V. Kadłub okrętu wyposażony jest w trzy silniki diesla (jeden w rezerwie) o mocy 150 KM każdy. Z. każdy, które pracują na generatorach prądu stałego i wałach napędowych.
Praca dźwigu jest dozwolona w temperaturze nie niższej niż -25 °. Zespół składa się z 22 osób. podczas pracy dwuzmianowej.
Zgodnie ze swoimi właściwościami żuraw może być stosowany do budowy nabrzeży morskich i rzecznych z prefabrykowanych zunifikowanych elementów żelbetowych. W budownictwie mostowym żuraw nadaje się do zanurzania powłok, montażu podpór blokowych oraz montażu elementów prefabrykowanych żelbetowych ustrojów nośnych.
Nadmierna masywność żurawia (masa 543 ton, szerokość pontonu 20 m, wysokość żurawia w pozycji transportowej 15 m) ogranicza jego przeprawę po śródlądowych drogach wodnych tylko I klasy, a następnie w niżówce.

Ryż. 8. Schemat samobieżnego pływającego dźwigu 50-tonowego „Bleichert”: 1 - chwytak (lub hak); 2 - „kot”; 3 - wciągnik łańcuchowy wysięgnika; 4 - podkreślenie ogranicznika minimalnego zwisu; 5 - kontrola pu;y>t; w - dźwig montażowy; 7- maszynownia; 8 - przeciwwaga; 9 - obrotowe urządzenie rolkowe; 10 - stojak do układania wysięgnika
W pełni obrotowy pływający 50-tonowy dźwig produkcji krajowej, podobnie jak opisany powyżej żuraw Bleychert, jest wyposażony w trzy niezależne haki do podnoszenia: główny udźwig wynosi 50 ton, pomocniczy to hak Yuti na „kocie” - 5 ton .
Maszynownia żurawia wraz z wysięgnikiem, przeciwwagami i pulpitem sterowniczym znajduje się na obracalni rolkowej, umieszczonej na stojaku o wysokości 5,4 m od pokładu pontonu. W ten sposób powstał znaczny wymiar pod wysięgnikiem, który jest niezbędny do produkcji ładunków i prac stoczniowych, do których żuraw został zaprojektowany.
Cechą żurawia jest bardzo racjonalna konstrukcja wysięgnika i konstrukcji metalowych żurawia. Wysięgnik w formie trójkątnej kratownicy ukośnej podtrzymywany jest przez wciągnik łańcuchowy wysięgnika oraz 40-tonową ruchomą przeciwwagę dwustronnego działania, która na dużych
odejścia wytwarza siłę działającą na wysięgnik, która jest przeciwna do momentu obciążenia, a tym samym zmniejsza obciążenie wciągarki wysięgnika. Przy niskich nawisach siła przeciwwagi odpowiada momentowi obciążenia, dzięki czemu bom nie przewraca się w kierunku przeciwwagi, co jest szczególnie ważne na wzburzonym morzu i bez obciążenia haków. Konstrukcje metalowe żurawia wykonane są z oddzielnych dużych sekcji, z uwzględnieniem wymagań dotyczących szybkiego montażu i demontażu.

Ryż. 9. Schemat w pełni obrotowego dźwigu pływającego o udźwigu 50 ton: 1-linowy wciągnik łańcuchowy do wymiany wysięgnika; 2 - panel kontrolny; 3- przeciwwaga; 4-stojak; 5 - stojak do układania wysięgnika
W pozycji transportowej wysięgnik opuszcza się wzdłuż pontonu na stojak, jednak ze względu na wysokie usytuowanie maszynowni i zamocowanie bloków stałych wysięgnika wysokość żurawia wynosi około 26 m od poziomu wody. Po demontażu mechanizmu zmiany zasięgu wysięgnika wysokość zmniejsza się do 17 m.
Żuraw jest samobieżny dwuśrubowy. Elektrownia składa się z dwóch silników wysokoprężnych ZD-6 oraz prądnic prądu stałego o mocy 100 kVA każdy. Oprócz nich istnieje silnik zapasowy. Dla wszystkich ruchów i śmigieł zainstalowane są niezależne silniki elektryczne. Elektrownia zlokalizowana jest w kadłubie pontonu, gdzie znajdują się również pomieszczenia dla załogi, bytowe i serwisowe. Żuraw wyposażony jest w automatyczne wskaźniki wysięgu i udźwigu. Masa żurawia 422 t.
Żuraw pełnoobrotowy z powodzeniem może być stosowany przy budowie morskich konstrukcji hydraulicznych.
Pływający 60-tonowy dźwig firmy "Dravo" (USA) produkowany w latach 1941 - 1945. pełnoobrotowy niesamobieżny ze strzałą w postaci trójwymiarowej kratownicy z trójkątną siatką. Zmiana odejścia strzały jest dokonywana przez polyspast. Na wysięgniku zamontowane są dwa haki o udźwigu 60 i 15 ton, które można zastąpić chwytakiem.
Maszynownia żurawia z zamocowanym na górze wysięgnikiem, kabiną sterowniczą i przeciwwagą obraca się na obrotnicy rolkowej spoczywającej na pokładzie pontonu. Jako główny napęd zastosowano silnik wysokoprężny Atlas o mocy 275 KM. Z. W wielu żurawiach te silniki wysokoprężne zostały zastąpione silnikami krajowymi. Pneumatyczne sterowanie dźwigiem. Ruch żurawia podczas pracy odbywa się za pomocą elektrycznych kolców zainstalowanych w rogach pontonu. Spawany kadłub jest podzielony siecią wodoszczelnych grodzi. Wewnątrz pontonu znajdują się pomieszczenia pomocnicze, mieszkalne i gospodarcze.

Ryż. 10. Schemat pływającego 60-tonowego dźwigu „Dravo”: 1 - blok koła pasowego wysięgnika; 2 - kabina operatora dźwigu; 3 obrotowe korony rolkowe; 4 - stojak do układania wysięgnika
W pozycji złożonej wysięgnik żurawia jest opuszczany wzdłuż pontonu na stojak. Jednak ze względu na wysokie umiejscowienie mocowania stałych bloków wysięgnika wysokość transportowa żurawia z wody wynosi około 22 m. Po częściowym demontażu wysokość żurawia można zmniejszyć do 16 m.
Żurawie tego typu są bardzo proste w konstrukcji, łatwe w obsłudze i mogą być z powodzeniem stosowane w budownictwie offshore na akwenach zamkniętych przed falowaniem.
Do wad żurawia należy zaliczyć dużą wysokość transportową oraz dużą szerokość pontonu (18,8 m), co ogranicza jego zastosowanie w budownictwie rzecznym (przejazd śródlądowymi drogami wodnymi tylko I klasy, a następnie z częściowym demontażem konstrukcji górnej) .
Pływający pełnoobrotowy 60-tonowy żuraw (projekt krajowy) ma dwa haki: główny o udźwigu 50-60 ton i pomocniczy - 15 ton, który można zastąpić chwytakiem.
Wysięgnik żurawia (ryc. 11) o kształcie ostrosłupa trójściennego składa się z trzech pasów o pełnych kształtach połączonych cięgnami. Zmiana 110 odejścia wysięgnika jest dokonywana przez bloczek linowy. Wysięgnik posiada ruchomą przeciwwagę. Dolny przegub wysięgnika znajduje się na wysokości 14 m nad lustrem wody, co zapewnia duży prześwit pod wysięgnikiem wymagany do załadunku towarów na statki o wysokich burtach. Maszynownia żurawia z mechanizmami podnoszącymi, ruchomymi i stałymi przeciwwagami, wysięgnikiem i pulpitem sterowniczym znajduje się na rufie jednostki i obraca się na kolumnie (na łożyskach pionowych i poziomych). Jako źródło energii w kadłubie statku zainstalowane są dwa generatory diesla DGR-300/500 o mocy 300 kW każdy, prądu przemiennego o napięciu 380 V.

Ryż. 11. Schemat w pełni obrotowego pływającego 60-tonowego dźwigu (projekt krajowy): 1 - wysięgnik; 2 - łożysko oporowe kolumny centralnej; 3- panel sterowania dźwigiem; 4- sterówka statku; 5 - stojak na wysięgnik; 6 - silniki w kształcie skrzydeł; 7 - maszynownia dźwigu; 8 - ruchoma przeciwwaga wysięgnika
Żuraw jest przystosowany do pracy na morzu przy falowaniu do 2-3 punktów i wietrze do 6 punktów. Statek z dźwigiem ma kontury statku i porusza się z prędkością do 11 km/h, przy dużej manewrowości.
W pozycji transportowej wysięgnik żurawia jest opuszczony na stojak i umieszczony wzdłuż pokładu. W tej pozycji wysokość żurawia od poziomu wody wynosi około 21 m. Przy częściowym demontażu konstrukcji w celu zamocowania stałych bloków wysięgnika i opuszczeniu samego wysięgnika wysokość transportową można zmniejszyć do 14,5 m. i wiatr do 5 punktów. Holowanie dźwigiem bez demontażu może odbywać się przy fali nie przekraczającej 5 punktów i wietrze 6 punktów.
Wyporność żurawia w pozycji transportowej wynosi 1080 t. Załoga dźwigu liczy 14 osób. do pracy dwuzmianowej. Kwatery załogi, zlokalizowane w kadłubie statku, wyposażone są w system klimatyzacji i są wykończone tworzywem sztucznym. Statek dźwigowy jest wyposażony w urządzenia cumownicze i kotwiczne, sprzęt przeciwpożarowy i ratowniczy zgodnie z normami Rejestru Morskiego ZSRR.
Ze względu na swoją charakterystykę uniwersalne dźwigi pływające o udźwigu 30-60 ton są szeroko stosowane w praktyce budowy portów morskich.
Żurawie uniwersalne o udźwigu 90 - 100 t
Żuraw pływający firmy Dravo (USA) o udźwigu 90 ton (rys. 12) na haku głównym i 20 ton na haku pomocniczym. Żuraw spalinowo-elektryczny nie jest samobieżny i ma podobną konstrukcję do opisanego powyżej 60-tonowego dźwigu tej samej firmy, ale ma nieco większe wymiary. Elektrownia jest reprezentowana przez dwa generatory diesla o mocy 125 kW każdy.

Ryż. 12. Pływający 100-tonowy dźwig firmy „Dravo”: 1 - ponton; 2-panel sterowania; 3- strzałka; 4 - hak główny 90-t; 5 - hak pomocniczy; b - stojak do układania strzały; 7 - wysięgnik do mocowania stałych bloków wysięgnika
Wysokość żurawia w pozycji transportowej wynosi około 22 m, co utrudnia jego użytkowanie na wodach śródlądowych i ogranicza jego zastosowanie jedynie do budowy morskich konstrukcji hydraulicznych.
Żuraw pływający „Hans” zbudowany w 1949 r. (zakład im. Georgiu-Dezh, Węgry) o udźwigu 100 ton na haku głównym i 35 ton na haku pomocniczym przy wszystkich odejściach wysięgnika.
Wysięgnik żurawia o długości 35 m konstrukcji przelotowej jest wzmocniony! zawias na wysokości 13 m od pokładu pontonowego. Zmiana wyjazdu! Bom wykonany jest za pomocą dwóch śmigieł napędzanych silnikami elektrycznymi. Użycie chwytaka nie jest przewidziane.

Ryż. 13. Schemat pływającego 100-tonowego dźwigu „Hans” zbudowanego w 1949 r.: 1 - wysięgnik; 2 - kabina sterownicza; 3- podporowe łożysko wałeczkowe; 4 - środkowa kolumna; 5 - przeciwwaga; 6 - śruby do zmiany zasięgu wysięgnika
Obrotowa część żurawia znajduje się w formie kopuły na piramidalnej kolumnie o wysokości 8,5 m od pokładu, na którym niejako umieszczona jest cała obrotowa część żurawia. W dolnej części kolumny na poziomie pokładu zamocowana jest obrotnica, a na obrotowej części żurawia znajdują się koła zębate do obracania.
Maszynownia żurawia, przeciwwaga, wysięgnik i panel sterowania znajdują się na obrotowej części żurawia.
W całkowicie spawanym kadłubie statku (pontonie) zainstalowane są dwa silniki wysokoprężne o pojemności 100 litrów każdy. Z. z generatorami prądu stałego i pomocniczym olejem napędowym o mocy 24 KM. Z. z generatorem do parkowania. W pontonie znajdują się pomieszczenia mieszkalne i socjalne dla załogi, a także zbiorniki na paliwo, świeżą wodę itp. Żuraw jest samojezdny i posiada dwie śruby napędowe. Do operacji cumowania w rogach pontonu zainstalowane są cztery kabestany elektryczne. Wysięgnik żurawia nie opada na ponton iw pozycji transportowej jest nachylony pod kątem 25° do poziomu.
Głównym celem żurawia jest kompletacja statków i załadunek ciężkich ładunków, w związku z czym zapewniony jest wysoki prześwit wysięgnika. Ze względu na małą prędkość działania żuraw jest nieefektywny przy montażu konstrukcji prefabrykowanych, a z większym powodzeniem może być wykorzystywany przy przeładunku elementów i tablic żelbetowych w fabrykach i wysypiskach na obiekty pływające. Wskazane jest również użycie dźwigu w przypadkach, gdy konieczne jest radzenie sobie z szczególnie długimi, ale stosunkowo lekkimi konstrukcjami, ponieważ wysokość podnoszenia nad wodą dla 35-tonowego haka wynosi 40 m. Ze względu na swoją masywność żuraw nie może być wykorzystywane do celów budownictwa rzecznego, a także w zakresie budowy mostów.
Żuraw pływający „Hans”, zbudowany w 1956 roku przez tę samą fabrykę co poprzedni, ma udźwig 100 ton na haku głównym i 25 ton na haku pomocniczym. Wysięgnik żurawia przegubowego o konstrukcji kratowej posiada wysięgnik poruszający się w kierunku przeciwnym do wysięgnika, dzięki czemu haki ładunkowe na wszystkich odjazdach znajdują się niemal na tej samej wysokości. Zmiany wysięgu wysięgnika dokonuje system śrubowy z częściowym wyważeniem ruchomą przeciwwagą.

Ryż. 14. Schemat pływającego 100-tonowego dźwigu „Hans” z roku 1956: 1 - mechanizm śrubowy do zmiany wysięgnika; 2 – ruchoma przeciwwaga 124 t; 3- maszynownia; 4 - kolumna wspierająca; 5 - panel kontrolny
Obrotowa część żurawia jest wykonana podobnie do opisanego powyżej żurawia typu 1949. Całkowicie spawany ponton dźwigu podzielony jest na 15 przedziałów wodoszczelnymi przegrodami, co zapewnia niezatapialność żurawia nawet wtedy, gdy dwa przedziały są wypełnione wodą. Źródłem energii są dwa silniki wysokoprężne o pojemności 160 litrów każdy, zainstalowane wewnątrz pontonu. Z. z generatorami prądu stałego i dwoma pomocniczymi generatorami diesla o pojemności 24 litrów każdy. Z. każdy. Żuraw posiada dwie śruby napędzane silnikami elektrycznymi o mocy 100 kW każda. Poruszanie się na krótkich dystansach odbywa się za pomocą kolców elektrycznych.
W pozycji transportowej wysięgnik żurawia nie mieści się, przez co wymiary nawiewu i powierzchni żurawia są bardzo duże.
Zgodnie ze swoimi właściwościami 100-tonowy żuraw Hans (1956), w porównaniu z innymi opisanymi 100-tonowymi dźwigami, jest głównym do budowy nabrzeży morskich, falochronów i konstrukcji zabezpieczających brzegi, chociaż w swojej konstrukcji jest bardziej odpowiedni do budowy statków oraz operacji załadunku i rozładunku.
Jednocześnie żuraw „Hans” ma niewystarczającą wysokość wylotu haków głównych i pomocniczych, która przy odjazdach roboczych z uwzględnieniem przechyłu wynosi około 25 m, co nie wystarcza do włożenia łusek o długości 24 m do prowadnic, które są szeroko stosowane w praktyce budownictwa hydrotechnicznego. Stosunkowo niewielka moc silników i duży wiatr żurawia wymagają do jego poruszania się nawet na zamkniętych wodach portowych użycia holowników o mocy 400-500 KM. To znaczy, co radykalnie zwiększa koszt żurawia z przesuwem maszynowym. Do wad należy także brak możliwości przemieszczania żurawia śródlądowymi drogami wodnymi z jednego akwenu morskiego do drugiego oraz pracy na rzekach i zbiornikach wodnych. Brak chwytaka nie pozwala dźwigowi na wykonywanie podwodnych wykopów w glebie, co jest niezbędne do budowy konstrukcji zabezpieczających brzegi na wodach otwartych oraz w wielu innych przypadkach.
Żuraw jest serwisowany (ze względu na brak pilota) przez 22-osobowy zespół. podczas pracy dwuzmianowej.
Unikalne pływające dźwigi
Unikatowe są żurawie uniwersalne, które wyróżniają się sporym udźwigiem, sięgającym 250 - 350 ton. Takie są na przykład dźwigi zakładu Krasnoje Sormowo i firmy Demag.
Udźwig haka głównego wynosi 250 t, haka pomocniczego 140 t. Dodatkowo po wysięgniku żurawia porusza się „kot” z hakiem o udźwigu 10 t.
Żuraw obraca się w pełni pod każdym obciążeniem. Wysięgnik żurawia o długości 72 m składa się z trzech mocnych pasów z trójkątną kratownicą i poprzecznymi ogniwami wzdłuż dolnego pasa. Zmiana zasięgu wysięgnika realizowana jest za pomocą dwóch wciągników łańcuchowych 16-nitkowych. Wysięgnik posiada ruchomą przeciwwagę, która zapobiega kołysaniu się podczas toczenia. Wysięgnik mocowany jest na wysokości 24,5 m od pokładu, co zapewnia duży wymiar pod wysięgnikiem oraz dużą wysokość podnoszenia haków.
Nadbudowę żurawia wraz z maszynownią, przeciwwagą, wysięgnikiem i pulpitem sterowniczym można obracać na kolumnie zamocowanej w kadłubie statku.
Dwa statki z dźwigiem są połączone mostem typu katamaran dla większej stabilności, ponieważ żuraw jest przeznaczony do pracy na pełnym morzu, a jego masa własna sięga 2080 ton.
Dźwig znajduje się na lewym statku; na prawym statku znajdują się dwa zespoły napędowe spalinowo-elektryczne o wydajności 4400 /se/l, obsługujące mechanizmy ruchu statku i jeden 1500 kW - dla mechanizmów dźwigowych. Są też ładownie, zapasy wody i paliwa. Sparowany układ statków pozwala na posiadanie dużej powierzchni pokładu ładunkowego niezbędnej do transportu konstrukcji przestrzennych platform wiertniczych itp., a także zapewnia wysoką zdolność żeglugową w porównaniu z pojedynczymi pontonami dźwigów pływających. Ze względu na dużą stabilność dopuszcza się pracę żurawia przy falowaniu do 4-5 punktów (wysokość fali do 3 m) i sile wiatru 6 punktów, a ruch - przy falowaniu do 6 punktów (wysokość fali do 6 m) oraz dobić do 8 punktów.

Ryż. 15. Schemat pływającego dźwigu samobieżnego o udźwigu 250 ton na bliźniaczych statkach: a - stanowiska robocze; b - pozycja transportowa; 1 - wysięgnik wciągnika łańcuchowego; 2 - ruchoma przeciwwaga wysięgnika; 3 - maszynownia dźwigu; 4-środkowa kolumna; 5 - działająca kabina statku; 6 - panel sterowania dźwigiem; 7 - łożysko oporowe; 8 - stań za strzałą
Śmigła umieszczone na rufie i dziobie każdego statku zapewniają dużą zwrotność żurawia, która jest niezbędna do precyzyjnego montażu na stanowiskach pracy. Podczas przejść obsługiwany jest dźwig ze sterówki znajdującej się na wysokości 13 m od pokładu. W pozycji złożonej wysięgnik żurawia jest opuszczany i ustawiany pod kątem do osi wzdłużnej statku, mocując go na stojaku na dziobie prawego statku. W celu dokowania statki są rozdzielane i niezależnie doprowadzane do doku. Żuraw wyposażony jest w alarm ostrzegawczy oraz urządzenia zabezpieczające przed przeciążeniami przekraczającymi obliczone. W sterowaniu suwnicami stosowane są systemy zdalne i automatyczne.
Kabiny załogi i pomieszczenia służbowe zlokalizowane w kadłubie statku wyposażone są w klimatyzację, ciepłą i zimną wodę oraz inne udogodnienia.
Pływający samojezdny żuraw 350 Demag został zbudowany w Niemczech w latach 1938-1940. Dzięki udźwigowi, rozmiarom i mocy silnika żuraw ten jest również jednym z największych dźwigów pływających na świecie.
Układ podnoszenia składa się z dwóch 175-tonowych głównych haków podnoszących połączonych trawersem, dwóch 30-tonowych pomocniczych haków podnoszących poruszających się na wózku wzdłuż belki wysięgnika (wysięgnika) oraz 10-tonowego haka kotowego poruszającego się po wysięgniku.
Żuraw obraca się w pełni pod każdym obciążeniem. Wysięgnik żurawia o długości około 80 m, o konstrukcji przegubowej, posiada dwa obejmujące go wahacze oraz ruchomą przeciwwagę o masie 200 t. Zmiana wysięgu wysięgnika odbywa się za pomocą mechanizmu śrubowego. Obrotowa część żurawia osadzona jest w kształcie dzwonu na piramidalnej kolumnie zamocowanej w korpusie pontonu. Podtrzymujące łożysko wałeczkowe na głowicy kolumny, na którym odbywa się obrót, ma średnicę 2,5 m i wytrzymuje obciążenie 2100 ton.
Na obrotowej części żurawia znajduje się trzykondygnacyjna maszynownia żurawia ze stałą 400-tonową przeciwwagą, wysięgnikiem i pulpitem sterowniczym. Kadłub statku - ponton - podzielony jest wodoodpornymi przegrodami na 35 przedziałów. Na pokładzie znajduje się platforma dla ładunków o wymiarach 20 × 26 m. Do ruchu i zwrotności żurawia zainstalowane są trzy śmigła wodne systemu Voith-Schneider - dwa na rufie i jeden na dziobie statku. Do cumowania na rogach pontonu przewidziane są kabestany elektryczne.

Ryż. 16. Pływający samobieżny 350-tonowy dźwig firmy „Demag”: 1 - nasadka wysięgnika; 2 - wahacze wysięgnika; i ruchomą przeciwwagę 200; 4 - śrubowy mechanizm zmiany zasięgu wysięgnika; 5 - trzykondygnacyjna maszynownia z 400-tonową przeciwwagą; 6 - mechanizm obrotowy; 7 piramidalnych kolumn wsporczych; 8 - panel kontrolny
Elektrownia centralna, umieszczona wewnątrz pontonu, składa się z trzech generatorów diesla o mocy 800 kW każdy oraz pomocniczego generatora diesla o mocy 225 kW prądu przemiennego. Są też domki dla 23 osób. brygady, pomieszczenia magazynowe i gospodarcze oraz warsztat.
Całkowita masa żurawia wynosi 5000 ton, wysokość od poziomu wody z podniesionym wysięgnikiem to około 115 m, a moment obciążenia to 10 500 tm.
Głównym celem żurawia jest budowa statków i podnoszenie statków. Może być również wykorzystany do celów budowlanych.
W sumie zbudowano kilka dźwigów tego typu, z których jeden jest eksploatowany w ZSRR na Morzu Bałtyckim.
Dźwigi pływające za granicą
W praktyce zagranicznej w ostatnich latach zbudowano szereg bardzo zaawansowanych żurawi pływających, przeznaczonych zarówno do budownictwa hydrotechnicznego na morzu, jak i do operacji transportowych.
Dźwig pływający produkcji Hokodate Doc (Japonia) o udźwigu 50 ton został zbudowany w 1962 roku do budowy portów.
Wysięgnik żurawia płaskiego składa się z dwóch gałęzi połączonych cięgnami. Bom oprócz głównego haka posiada drugi hak o mniejszym udźwigu. Zmiana odejścia strzały jest wykonana poli-spasty. W pozycji transportowej bom układa się wzdłuż pontonu i na stojaku znajdującym się na rufie.

Ryż. Ryc. 16. Schemat dźwigu pływającego firmy Hokodate Doc o udźwigu 50 ton: 1 stanowisko do układania wysięgnika; 2 - pomieszczenie na generatory diesla; 3 - wciągarki cumownicze; 4 - pomieszczenie na mechanizmy podnoszące; 5 - panel kontrolny
Maszynownia z wyciągarkami, panelem sterowania, przeciwwagami i wysięgnikiem obraca się na sparowanych rolkach równoważących poruszających się po koronie zamontowanej na pokładzie pontonu.
Samojezdny żuraw spalinowo-elektryczny z dwoma silnikami wysokoprężnymi o mocy 180 KM każdy. Z. każdy umieszczony w nadbudówce pokładowej. Są też kwatery załogi, kuchnia i prysznic. Kadłub pontonu jest wyposażony w elektryczne wciągarki i urządzenia cumownicze do przemieszczania żurawia na krótkich dystansach.
Ta sama firma zbudowała pływający dźwig bez własnego napędu o podobnej konstrukcji, ale nieco mniejszy io udźwigu 30 ton.
Pływający żuraw manewrowy Samson o udźwigu 60 ton został zbudowany przez firmę Forged Sheldon and Co. w Carlyle (Anglia).
W pełni obrotowy żuraw spalinowo-elektryczny z mechanizmem śrubowym i ruchomą przeciwwagą do zmiany zasięgu wysięgnika, z niezależnymi silnikami dla każdego mechanizmu.
Korpus żurawia jest w całości spawany z konturami statku, podzielonymi na dziewięć wodoszczelnych przedziałów. W części rufowej pokład jest wzmocniony, aby przyjąć ładunek o łącznej masie 200 ton.
Żuraw wyposażony jest w szybkobieżną wciągarkę pomocniczą oraz drugi hak o udźwigu odpowiednio 20 ton, o większym promieniu działania niż główny hak nośny. Sterowanie elektryczne, wykonane zgodnie z systemem Warda-Leonarda, pozwala na zwiększenie prędkości podnoszenia głównego żurawia do obsługi ładunków mniejszych niż maksymalny ciężar.

Ryż. 17. Dźwig zwrotny pływający „Samson” o udźwigu 60 ton: 1 - winda pomocnicza 20 ton; 2- podnoszenie główne 60 t; 3 - śruby do zmiany zasięgu wysięgnika; 4- wysięgnik mobilny 81 - t przeciwwaga; 5 - maszynownia ze stałą przeciwwagą 128 t; 5 - panel kontrolny
Cechą konstrukcyjną Samsona jest urządzenie manewrujące na dziobie, składające się z dużej pompy odśrodkowej, która zasysa wodę spod kadłuba i wyrzuca ją na dowolną stronę, w zależności od kierunku obrotu. Wraz z dwoma równoległymi śrubami rufowymi o długości 10,4 m i dwoma opływowymi sterami, urządzenie to zapewnia żurawowi maksymalną zwrotność nawet przy niskich prędkościach i pozwala na precyzyjne zatrzymywanie się przy nabrzeżach i poruszanie się bez holowania.
Górna konstrukcja żurawia osadzona jest na obrotowej ramie, na której znajdują się również elementy nośne wysięgnika, mechanizmy podnoszące oraz 128-tonowa przeciwwaga. Wysięgnik jest podnoszony przez dwa ślimaki z gwintem pasowym, które pracują w synchronizacji. Śruby podnoszące są całkowicie osłonięte stalowymi przesuwnymi osłonami chroniącymi je przed deszczem i brudem. Wysięgnik nie opuszcza się do pokładu, dlatego najmniejsza wysokość transportowa żurawia wynosi 40 m.
Silnik główny i napędowy składają się z dwóch silników wysokoprężnych o mocy 900 KM każdy. Z. każdy podłączony do głównego i pomocniczego generatora prądu stałego. Moc dodatkowych generatorów ma na celu zapewnienie pracy całego żurawia, nawet z pewnym zapasem.
Dzięki wysokim walorom żeglownym żuraw jest wygodny do pracy na wodach otwartych podczas budowy pomostów, falochronów i konstrukcji zabezpieczających brzegi.

Ryż. 18. Schemat pływającego 100-tonowego dźwigu firmy Ornstein Koppel: 1 - wysięgnik; 2 - panel kontrolny; 3 - sterówka; 4 - mechanizm obrotowy; 5 - maszynownia ze stałą przeciwwagą; 6 - mobilna przeciwwaga; 7 - łożysko oporowe
Pływający żuraw 100-/I firmy Ornstein Koppel (Niemcy) jest wyposażony w dwa główne haki o udźwigu 50 ton każdy (ryc. 62). Oba haki są połączone wspólnym trawersem. Mechanizmy podnoszenia haków pracują synchronicznie. Oprócz głównych znajduje się hak pomocniczy \b-t z niezależną wyciągarką.
Długość wysięgnika żurawia kratowego wynosi 42 m. Zmiana wysięgnika odbywa się za pomocą dwóch śmigieł napędzanych silnikiem elektrycznym. Ciężar wysięgnika jest znacznie równoważony przez 40-tonową ruchomą przeciwwagę połączoną z nim obrotowo. Połowa momentu wywracającego z obciążenia roboczego jest równoważona przez 164-tonową przeciwwagę umieszczoną za maszynownią.
Górna obrotowa część żurawia w formie kopuły jest osadzona na łożysku tocznym na kolumnie wsporczej zamocowanej w kadłubie statku. Do dolnej części kolumny przymocowany jest obrotowy pierścień z kołem zębatym, które obraca górną część żurawia o 360°.
W całkowicie spawanym kadłubie jednostki znajdują się dwa silniki Diesla o pojemności 200 litrów każdy. Z. przy 750 obr./min. Wały spalinowe połączone są z jednej strony z prądnicami trójfazowymi o mocy 130 kw, pracującymi synchronicznie na mechanizmach podnoszących, az drugiej strony z wałami napędowymi. Do pracy na parkingu dostępny jest dodatkowo agregat prądotwórczy diesla 90 kW. Żuraw wyposażony jest w urządzenia wskazujące masę ładunku, wysięg i wysokość haka ładunkowego.
W pozycji transportowej wysięgnik jest opuszczony do pozycji poziomej i zamocowany na słupku podporowym, podczas gdy wiatr i wysokość żurawia są znacznie zmniejszone, dzięki czemu można go transportować drogą morską bez demontażu nawet na wzburzonym morzu, co potwierdzono, gdy żuraw przemieścił się do miejsca przeznaczenia, z Hamburga do irackiego portu Basra.
Dzięki swojej charakterystyce żuraw jest bardzo wygodny do obsługi konstrukcji hydrotechnicznych na morzu.
Żuraw pływający firmy Krupp (Niemcy) o udźwigu 150 ton na haku głównym i 30 ton na haku pomocniczym.
Wysięgnik żurawia przegubowego wykonany jest w formie metalowej konstrukcji z solidnymi ścianami, co nadaje żurawiowi nowoczesny wygląd.
Konstrukcja obrotowa i system równoważenia obciążenia są takie same jak w powyższym żurawiu Ornstein Koppel o rozstawie 100. Aby przemieszczać się na duże odległości, wysięgnik żurawia jest opuszczany do pozycji poziomej za pomocą specjalnego urządzenia śrubowego. Kadłub statku (ponton) jest w całości spawany. Elektrownia składa się z dwóch głównych 500 KM. Z. oraz dwa pomocnicze silniki wysokoprężne o pojemności 156 litrów każdy. e., związane z generatorami prądu. Statek dźwigu napędzany jest dwoma śrubami ukośnymi układu Voith-Schneider. Pokład pontonowy przewiduje możliwość załadowania na niego ładunku o łącznej masie do 300 ton.
Żuraw przeznaczony jest głównie do operacji załadunkowych i rozładunkowych w portach oraz na potrzeby przemysłu stoczniowego. Może być stosowany w morskim budownictwie hydrotechnicznym, ale tylko w portach z zamkniętymi akwenami wodnymi, gdyż znaczna wysokość żurawia w pozycji transportowej (około 30 m) stwarza duży wiatr i utrudnia manewrowanie żurawiem przy wietrze i falowaniu .

Ryż. 19. Pływająca 150-tonowa firma dźwigowa „Krupp”
Pływający 250-tonowy dźwig firmy Ornstein Koppel (Niemcy) został zbudowany dla portu w Buenos Aires (Brazylia) w latach 1956-1958.
Żuraw posiada dwa haki główne o udźwigu 125 ton każdy, połączone trawersą do podnoszenia ładunków o łącznej masie do 250 ton oraz dwa haki pomocnicze o udźwigu 40 i 10 ton. bum na „kota”.

Ryż. 20. Pływający 250-tonowy dźwig z Ornstein Koppel
Żuraw pracuje jako pełnoobrotowy o udźwigu do 150 ton, przy czym dopuszczalna jest zmiana wysięgu wysięgnika wraz z ładunkiem. Przy obciążeniu od 150 do 250 ton możliwe jest obrócenie żurawia tylko o 22°30' w obu kierunkach od osi podłużnej bez zmiany wysięgu wysięgnika wraz z ładunkiem. Największy moment obciążenia żurawia wynosi 5125 m.
Zabudowa żurawia z wysięgnikiem, maszynownia z wyciągarkami, przeciwwagami i pulpitem sterowniczym obraca się na mocnym osiowym łożysku wałeczkowym, pracującym w kąpieli olejowej. Łożysko jest osadzone na piramidalnej kolumnie zamocowanej w pontonie. Siły poziome z górnej konstrukcji żurawia przenoszone są na łożysko poziome, składające się z pierścienia o średnicy 5,7 mi ośmiu połączonych parami rolek. Takie urządzenie znacznie ułatwia skręcanie, ale zwiększa gabaryty żurawia i jest stosowane z reguły w niemieckich żurawiach o udźwigu powyżej 100 ton.
Wysięgnik dźwigu kratowego jest nitowany. Zmiana odejścia strzały odbywa się za pomocą dwóch polispastów. Wysięgnik jest częściowo wyważony przez przeciwwagę.
Żuraw nie jest samobieżny, a do jego przemieszczania służą cztery kabestany napędowe o sile 6 ton i prędkości wciągania liny 12 m/min. Ze względu na brak własnej mocy elektrownia żurawia składa się tylko z dwóch silników diesla o mocy 185 i 260 KM. Z. oraz trzy generatory prądu stałego 2 × 110 + 60 kW o napięciu 230 V. Na własne potrzeby na parkingu znajduje się pomocniczy generator diesla o pojemności 22,5 litra. Z. Wszystkie dziewięć silników żurawia jest tego samego typu i ma moc 44 kW każdy przy 750 obr./min.
Żuraw sterowany jest z konsoli centralnej znajdującej się na wysokości 14 m od pokładu. Przewidziano automatyczne urządzenia zapobiegające przeciążeniu żurawia oraz blokadę elektryczną w przypadku nieprawidłowego działania operatora żurawia.
Ponton dźwigu jest spawany, podzielony wodoodpornymi przegrodami na 18 przedziałów. Na pokładzie pontonu przewidziana jest platforma o wymiarach 9,5 × 9,5 do przyjmowania ładunków o masie do 10 t/m2. Wewnątrz pontonu znajdują się generatory diesla, kabiny mieszkalne dla 12 osób. załogi, pomieszczenia gospodarcze i magazynowe oraz warsztat.
W pozycji transportowej wysięgnik żurawia opuszczany jest do pokładu za pomocą własnych wciągników łańcuchowych i mocowany, a górna konstrukcja jest klinowana za pomocą podnośników hydraulicznych, co odciąża łożysko osiowe. W tej postaci żuraw może być holowany po morzu z prędkością 5-7 węzłów (do 13 km/h). Wysokość żurawia w pozycji transportowej wynosi około 32 m nad lustrem wody.
Żuraw ten przeznaczony jest do prac transportowych, ale może być również z powodzeniem wykorzystywany do budowy pomostów, pomostów i pomostów z dużych elementów i ciężkich tablic.
3. Żurawie z pływającą głowicą
Jako dźwigi do hydrotechniki i budowy mostów można zastosować ramy czołowe pływające z pochylonymi wysięgnikami, których zejście za burtę pontonu może odbywać się w zakresie od 3 do 9 m przy odpowiedniej nośności 30 i 10 ton. są zwykle stałe.
W tym obszarze najczęstsze wkrętarki udarowe z wahadłowymi strzałkami, na przykład wkrętarka udarowa typu SSCM-680 firmy Nillens itp.
Ściana czołowa SSSM-680 zamontowana na pontonie może służyć jako dźwig pływający, gdy bom znajduje się wzdłuż pontonu na wysięgnikach do 9 m od końca pontonu. Koper nie jest samobieżny. Źródłem energii jest kocioł parowy o powierzchni grzewczej 50 m2 przy ciśnieniu pary 6-8 kg/cm2. Mechanizmy podnoszenia - wciągarki parowe.
Operacje cumownicze wykonywane są za pomocą wciągarek ręcznych. Wewnątrz pontonu znajdują się pomieszczenia mieszkalne i gospodarcze dla 10 osób. drużyny kopry.
W pozycji transportowej wysięgnik jest obracany i układany wzdłuż pontonu na stojaku.
Pływający kafar firmy „Nillens” (Belgia) nie jest samobieżny. Bom znajduje się w dziobie pontonu na platformie obracającej się o 180°. Prace dźwigowe i wbijanie pali są dozwolone tylko wtedy, gdy wysięgnik znajduje się wzdłuż pontonu. W takim przypadku maksymalny zasięg wysięgnika od końca wyniesie 6,5 m.

Ryż. Ryc. 21. Schemat instalacji kopry Nillensa: a - do obsługi kopry; b-do obsługi dźwigu; 1-farma ze strzałką; wciągarka 2-bębnowa; 3- kocioł parowy; 4 - ponton; 5 - młot parowy; 6 - stojak do układania strzały; 7-balastowe zbiorniki na wodę
Wszystkie mechanizmy kopry są parowe i zasilane parą z kotła o ciśnieniu 8 kg!cm2. Kocioł znajduje się na obrotowym stole i jest jednocześnie przeciwwagą dla wysięgnika z młotem. Aby sprowadzić koprę do pozycji złożonej, obraca się obrotnicę z wysięgnikiem i kotłem o 180° i opuszcza się wysięgnik za pomocą specjalnego masztu i wciągnika łańcuchowego na stojak znajdujący się na rufie pontonu. Ponton posiada przedziały balastowe, zbiorniki na świeżą wodę i magazyny. Kabiny dla załogi znajdują się na pokładzie. Podczas pracy kafar porusza się na końcach cumowania za pomocą wciągarek i słupków.
Najnowocześniejszy jest kafar pływający zakładu Jübigau (NRD). Wysięgnik wahadłowy kopry wraz z kotłem parowym (powierzchnia grzewcza 34 m2 i ciśnienie do 10 kPcm) znajduje się na obrotnicy obracającej się o 360° (w dziobie pontonu). Wysięgnik kopry może przyjmować nachylenie do przodu 1/10, gdy znajduje się w poprzek pontonu i 1/3 - wzdłuż pontonu.
Para zapewnia tylko pracę młota podczas zanurzania pali, reszta mechanizmów ma napęd elektryczny z generatora diesla o mocy 57 kw. Dodatkowo na parkingu znajduje się pomocniczy generator diesla 12 kW na własne potrzeby.
Koper nie jest samobieżny. W pozycji transportowej wysięgnik jest obracany o 180° i opuszczany specjalnym masztem wzdłuż pontonu do stojaka.
Ponton Copra mieści zbiorniki świeżej wody, przedziały balastowe, bunkier paliwowy i magazyny. Ponton wyposażony jest w urządzenia cumownicze i pomieszczenia załogi.
DO Kategoria: - Dźwigi do budowy mostów